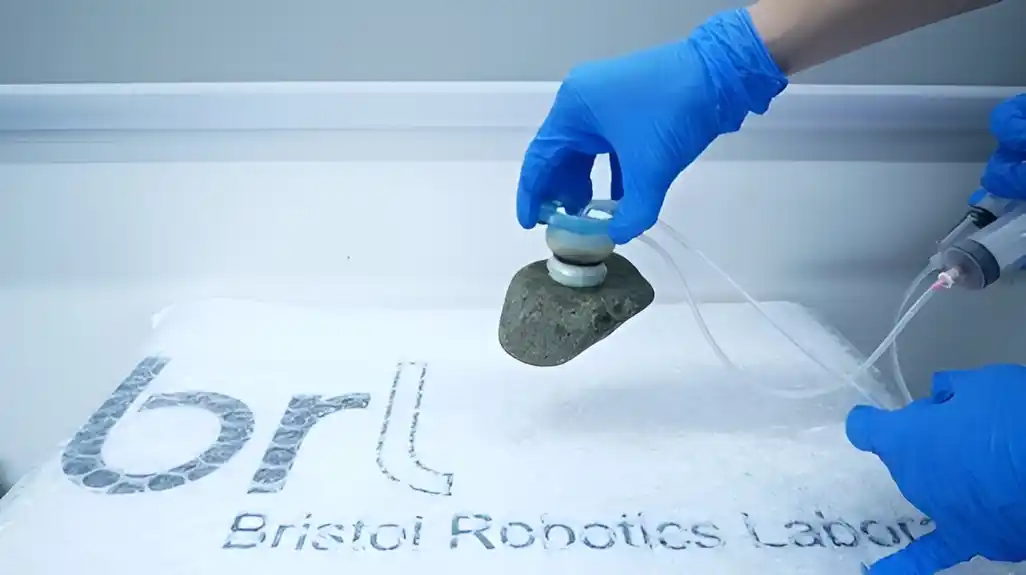
Naučnici sa Univerziteta u Bristolu razvili su novu robotsku usisnu čašu koja može da uhvati grub, zakrivljen i težak kamen. Tim, sa sedištem u laboratoriji za robotiku Bristol, proučavao je strukture bioloških sisaljki hobotnice, koje imaju odlične prilagodljive usisne sposobnosti koje im omogućavaju da se pričvrste za kamen.
U svojim nalazima, objavljenim u časopisu PNAS, istraživači pokazuju kako su bili u stanju da stvore višeslojnu meku strukturu i veštački fluidni sistem da oponašaju muskulaturu i strukture sluzi bioloških sisača.
Usisavanje je visoko razvijena strategija biološke adhezije za organizme mekog tela kako bi se postiglo snažno hvatanje različitih predmeta. Biološke sisaljke se mogu adaptivno pričvrstiti na suve složene površine kao što su kamenje i školjke, što je izuzetno izazovno za trenutne veštačke usisne čaše. Iako se veruje da je adaptivno usisavanje bioloških sisaljki rezultat mehaničke deformacije njihovog mekog tela, neke studije impliciraju da izlučivanje sluzi u sisaljku može biti još jedan kritični faktor u pomaganju pričvršćivanja na složene površine, zahvaljujući visokom viskozitetu.
Vodeći autor Tianki Iue je objasnio: „Najvažniji razvoj je to što smo uspešno demonstrirali efikasnost kombinacije mehaničke konformacije – upotrebe mekih materijala da se prilagode obliku površine i tečnog zaptivanja – širenja vode na dodirnu površinu radi poboljšanja Prilagodljivost usisavanja na složenim površinama može biti i tajna koja stoji iza sposobnosti bioloških organizama da postignu prilagodljivo usisavanje.“
Njihov usisni mehanizam na više nivoa je organska kombinacija mehaničke konformacije i regulisanog vodenog zaptivača. Višeslojni mekani materijali prvo stvaraju grubu mehaničku konformaciju na podlozi, smanjujući otvore za curenje na samo mikrometre.
Preostali otvori veličine mikrona se zatim zatvaraju regulisanim izlučivanjem vode iz veštačkog fluidnog sistema zasnovanog na fizičkom modelu, čime usisna čaša postiže dugotrajnost usisavanja na različitim površinama, ali sa minimalnim prelivanjem.
Tianki je dodao: „Verujemo da je predstavljeni prilagodljivi mehanizam usisavanja na više skala moćna nova strategija adaptivnog usisavanja koja može biti instrumentalna u razvoju svestrane meke adhezije.
„Trenutna industrijska rešenja koriste stalno uključene vazdušne pumpe da aktivno generišu usis, međutim, to je bučna i troši energiju.
„Bez potrebe za pumpom, dobro je poznato da mnogi prirodni organizmi sa sisavcima, uključujući hobotnice, neke ribe kao što su sisaljke i remore, pijavice, puževi i bodljokožaci, mogu da održe svoje vrhunsko prilagodljivo usisavanje na složenim površinama koristeći svoje meko telo strukture“.
Nalazi imaju veliki potencijal za industrijsku primenu, kao što je obezbeđivanje robotske hvataljke sledeće generacije za hvatanje raznih nepravilnih predmeta.
Tim sada planira da napravi inteligentniju usisnu čašu, ugradnjom senzora u usisnu čašu kako bi regulisala ponašanje usisne čaše.


