Četvoronožni roboti, takođe poznati kao četvoronožni roboti, imaju prednosti, uključujući sposobnost brzog hodanja po izazovnim terenima i zadržavanje niskog centra gravitacije. Neki četvoronožni roboti takođe mogu da manipulišu objektima u svom okruženju, ali to se obično postiže korišćenjem struktura nalik na ruke postavljene na vrhu robota, a ne udovima koje koriste za hodanje.
Istraživači sa Univerziteta Carnegie Mellon, Univerziteta u Vašingtonu i Google DeepMind nedavno su razvili inovativnog četvoronožnog robota koji može da podiže i rukuje obližnjim objektima koristeći iste noge koje koristi za hodanje. Utvrđeno je da je ovaj robotski sistem, predstavljen u radu objavljenom na serveru za preprint arKsiv, veoma spretan i svestran, uspešno obavljajući širok spektar zadataka manipulacije objektima.
„Četvoronožni roboti su svestrani agenti sposobni da izvode kretanje i manipulaciju u složenim okruženjima“, rekao je za Tech Ksplore Ding Zhao, vanredni profesor koji vodi CMU Safeti AI Lab i odgovarajući autor ovog rada. „Tradicionalni dizajn obično uključuje ruke postavljene na vrhu za zadatke manipulacije. Međutim, ove konfiguracije mogu ograničiti nosivost, stabilnost i efikasnost robota. U prirodi ne vidimo psa sa rukom na leđima“, rekao je Zhao.
LocoMan, novi robot koji su dizajnirali Zhao i njegove kolege, bavi se ograničenjima većine prethodno razvijenih četvoronožnih robota. Novi robot ima jedinstvenu morfologiju koja mu omogućava da prilagodi raspored svojih udova, tako da može da manipuliše objektima na različite načine.
Njegova jedinstvena struktura i konfiguracija omogućavaju LocoManu da izvrši manipulaciju 6D pozama u složenim okruženjima, uključujući i skučene prostore. Robot se oslanja na Loco-manipulator, novorazvijeni, skalabilan, jeftin, lagan i modularni manipulator sa 3-DoF.
Loko-manipulator je prilično jednostavan za proizvodnju i stoga bi se takođe mogao koristiti u velikim razmerama. Istraživači su integrisali dva loko-manipulatora na prednjim listovima svog robota, čime su osigurali da ova telad mogu da deluju i kao ruke.
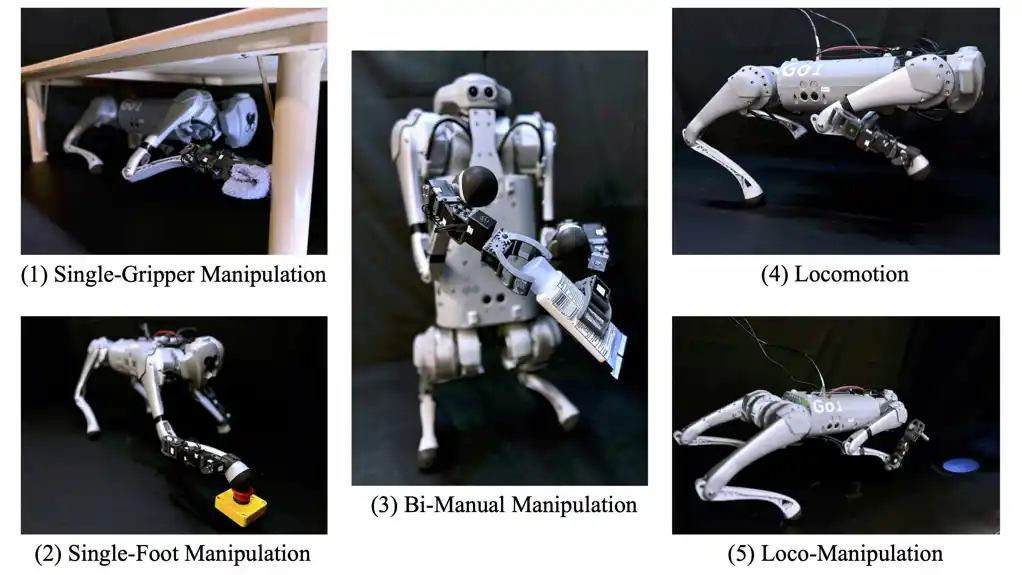
„LocoMan je svestrani četvoronožni robot, koji se sastoji od standardnog četvoronožnog robota i dva Loco-manipulatora“, rekao je Changii Lin, prva godina doktora nauka. student u laboratoriji profesora Zhaoa, objasnio je. „Ona funkcioniše u okviru sveobuhvatnog okvira za kontrolu celog tela (VBC), omogućavajući neometanu tranziciju kroz pet operativnih režima: manipulacija jednom hvataljkom, manipulacija jednom nogom, bimanualna manipulacija, lokomocija i loko-manipulacija. Opremanjem robota sa dva manipulatorima na listovima i integrišući njegove originalne noge, postigli smo 6D manipulaciju pozom.“
Zhao i njegove kolege su procenili svog robota u nizu eksperimenata u stvarnom svetu i otkrili da je izuzetno spretan. Osim što je jeftin i kompaktan, LocoMan može da se nosi sa složenim zadacima manipulacije, uključujući otvaranje vrata, uključivanje elektronike u utičnice i podizanje predmeta u skučenim prostorima.
„Naše istraživanje nudi drugačiju perspektivu inteligentnih robota. Umesto da repliciramo ljude sa sličnom morfologijom, želeli bismo da obezbedimo komplementarnog robota koji može da radi ono što ljudi možda ne žele“, rekao je Zhao. „LocoMan omogućava četvoronožnim robotima da obavljaju složene zadatke manipulacije u uskim prostorima.
Novi robot predstavljen u ovom nedavnom radu uskoro bi mogao biti testiran u širem spektru podešavanja i na kraju bi se mogao koristiti za rešavanje problema iz stvarnog sveta. U svojim sledećim studijama, Zhao i njegove kolege planiraju da dodatno unaprede sposobnosti svog robota koristeći najsavremeniju kompjutersku viziju i algoritme mašinskog učenja.
„Očekuje se da će integracija modela jezika vizije revolucionisati način na koji LocoMan generiše akcije“, dodao je Zhao. „Ovo bi se moglo postići tumačenjem vizuelne percepcije okruženja i obradom verbalnih instrukcija od ljudi, omogućavajući intuitivniju i besprekorniju interakciju.“


