Zamislite svet u kome se naučna fantastika susreće sa stvarnošću, gde najsavremenija tehnologija oživljava scene iz filmova poput Prometeja koje izazivaju strahopoštovanje. Ovo je revolucionarno istraživanje koje je vodio dr Fu Zhang, pomoćnik profesora na Odseku za mašinstvo na Fakultetu inženjerskih nauka Univerziteta u Hong Kongu (HKU), koji je razvio leteći ultra-podataknuti vazdušni robot LiDAR-sensing ( PULSAR) koji je spreman da redefiniše svet bespilotnih letelica (UAV).
Bespilotne letelice već igraju sve važniju ulogu u potrazi i spasavanju, istraživanju pećina i arhitektonskom mapiranju. PULSAR, prikladno nazvan po svojim sličnostima sa samorotiranjem i šablonom skeniranja astronomskog pulsara, podiže UAV tehnologiju na nove visine. Sa mikro-kompjuterom i LiDAR senzorom, PULSAR se može pohvaliti potpunim mogućnostima percepcije, mapiranja, planiranja i kontrole u unutrašnjem i spoljašnjem okruženju, sve bez potrebe za spoljnim instrumentima.
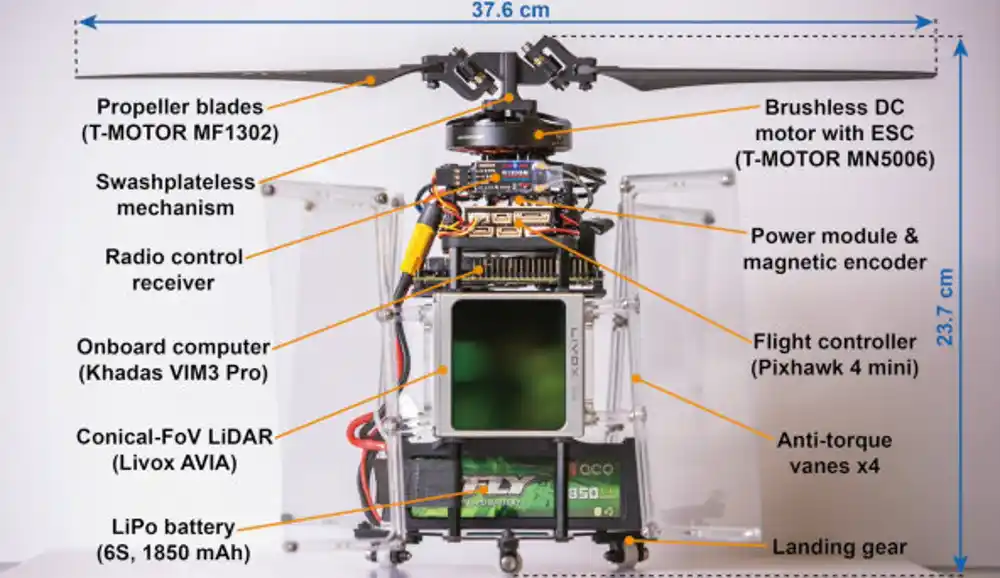
Tajna PULSAR-ove neverovatne funkcionalnosti leži u njegovom jednom aktuatoru, koji pokreće mehanizam bez preklopne ploče i obezbeđuje i potisak i moment. Kroz seriju eksperimenata, tim dr Džanga je pokazao PULSAR-ovu sposobnost da detektuje statičke i dinamičke prepreke u realnom vremenu, prati složene putanje i samostalno se kreće čak i u potpunom mraku.
PULSAR-ova robusnost se takođe proteže na otpornost na spoljašnje smetnje vetra, omogućavajući bezbednije i stabilnije letove u nepredvidivim uslovima. Pri maksimalnoj brzini vetra od 4,5 m/s, PULSAR može da zadrži svoju poziciju lebdenja unutar malog područja. Takva karakteristika omogućava bezbedniji i stabilniji let u divljini.
Pored svojih gore navedenih mogućnosti, senzor takođe može da proširi vidno polje (FoV) kroz samorotaciono kretanje, što poboljšava percepciju UAV-a i efikasnost zadataka. Trenutno postoje dva glavna pristupa za proširenje vidnog polja senzora, ali oba troše značajnu količinu energije.
Prvi pristup uključuje korišćenje senzora sa velikim FoV, kao što su kamere ribljeg oka, katadioptrične kamere ili 360° LiDAR, koji imaju tendenciju da proizvode izobličenja. Međutim, 360° LiDAR ima usku i nisku rezoluciju FoV u vertikalnom pravcu. Drugi pristup uključuje korišćenje više senzora, kao što je sistem sa više kamera ili više LiDAR sistema, ali to podrazumeva dodatne troškove i rezultira dužim vremenom obrade podataka.
Pronalazak PULSAR-a može da uštedi 26,7% potrošnje energije u poređenju sa kvadrotorskim UAV-om sa istom površinom diska propelera i nosivosti, uz istovremeno održavanje dobre agilnosti. Zahvaljujući svom pogonskom sistemu sa jednim aktuatorom, PULSAR doživljava manje gubitke konverzije energije, što rezultira visokom efikasnošću leta od 6,65 g/V.
Uprkos svojoj maloj veličini, sa prečnikom od samo 37,6 cm i kapacitetom baterije od samo 41 Vh, ovaj UAV od 1234 g postigao je vreme lebdenja od preko 12 minuta. Uklanjanjem LiDAR senzora i ugradnjom većeg propelera i baterije, vreme lebdenja PULSAR-a može se produžiti na više od 40 minuta.
Nalazi istraživanja predstavljeni su u Science Robotics.
Dr Džang je rekao da bi istraživačka platforma koju je uspostavio njegov tim mogla da bude pogodna za dalje istraživanje samorotirajućih bespilotnih letelica. „Verujemo da će to olakšati istraživanje metoda upravljanja UAV-om pod velikom brzinom rotacije i tehnika simultane lokalizacije i mapiranja (SLAM) pod agresivnim kretanjem.


