Istraživači sa Tehničkog univerziteta u Minhenu (TUM) razvili su softver za autonomnu vožnju koji na pravičan način raspoređuje rizik na ulici. Algoritam sadržan u softveru smatra se prvim koji je ugradio 20 etičkih preporuka ekspertske grupe Evropske komisije, donoseći na taj način znatno diferenciranije odluke od prethodnih algoritama.
Rad automatizovanih vozila treba učiniti znatno bezbednijim procenom različitih stepena rizika za pešake i vozače. Kod je dostupan široj javnosti kao softver otvorenog koda.
Tehnička realizacija nije jedina prepreka koju treba savladati pre nego što se autonomno vozećim vozilima omogući masovnije kretanje na ulici. Etička pitanja igraju važnu ulogu u razvoju odgovarajućih algoritama: Softver mora biti u stanju da se nosi sa nepredvidivim situacijama i donosi neophodne odluke u slučaju predstojeće nesreće.
Istraživači sa TUM-a su sada razvili prvi etički algoritam koji pravično raspoređuje nivoe rizika umesto da radi na principu ili/ili. Testirano je približno 2.000 scenarija koji uključuju kritične situacije, raspoređenih po različitim tipovima ulica i regiona kao što su Evropa, SAD i Kina. Istraživački rad objavljen u časopisu Nature Machine Intelligence je zajednički rezultat partnerstva između TUM katedre za automobilsku tehnologiju i katedre za poslovnu etiku na TUM institutu za etiku u veštačkoj inteligenciji (IEAI).
Maksimilijan Gajslinger, naučnik na TUM Katedri za automobilsku tehnologiju, objašnjava pristup: „Do sada su autonomna vozila uvek bila suočena sa izborom ili/ili kada su nailazili na etičku odluku. Ali ulični saobraćaj se ne može nužno podeliti na jasne- izrezane, crno-bele situacije; mnogo više, treba uzeti u obzir i bezbroj sivih nijansi između. Naš algoritam odmerava različite rizike i pravi etički izbor između hiljada mogućih ponašanja—i to čini za samo delić od sekunde.“
Osnovne etičke parametre na koje je orijentisana procena rizika softvera definisao je stručni panel kao pisanu preporuku u ime Komisije EU 2020. godine. Preporuka uključuje osnovne principe kao što su prioritet za najgore i pravedna raspodela rizika među svim učesnicima u saobraćaju. Da bi ova pravila pretočila u matematičke proračune, istraživački tim je klasifikovao vozila i osobe koje se kreću uličnim saobraćajem na osnovu rizika koji predstavljaju za druge i spremnosti da rizikuju.
Kamion, na primer, može prouzrokovati ozbiljnu štetu drugim učesnicima u saobraćaju, dok će u mnogim scenarijima sam kamion doživeti samo manju štetu. Suprotan je slučaj sa biciklom. U sledećem koraku algoritmu je rečeno da ne prelazi maksimalno prihvatljiv rizik u različitim situacijama na ulici. Pored toga, istraživački tim je u proračun dodao varijable koje uzimaju u obzir odgovornost učesnika u saobraćaju, na primer odgovornost za poštovanje saobraćajnih propisa.
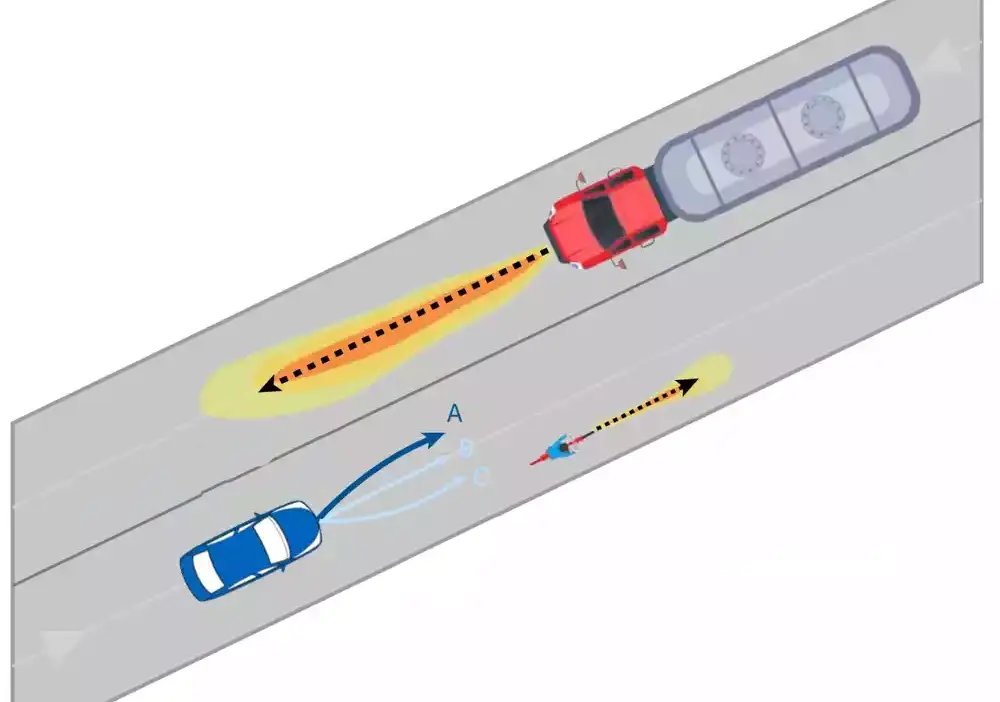
Raniji pristupi tretirali su kritične situacije na ulici sa samo malim brojem mogućih manevara; u nejasnim slučajevima vozilo se jednostavno zaustavlja. Procena rizika sada integrisana u kod istraživača dovodi do više mogućih stepena slobode sa manjim rizikom za sve. Primer će ilustrovati pristup: autonomno vozilo želi da prestigne bicikl, dok se kamion približava u nadolazećoj traci. Sada se koriste svi postojeći podaci o okruženju i pojedinačnim učesnicima.
Može li se bicikl prestići bez vožnje suprotnom saobraćajnom trakom i pri tome održavati bezbedno rastojanje od bicikla? Kakav rizik predstavlja svako vozilo i kakav rizik ova vozila predstavljaju za samo autonomno vozilo? U nejasnim slučajevima autonomno vozilo sa novim softverom uvek čeka dok rizik za sve učesnike ne bude prihvatljiv. Izbegavaju se agresivni manevri, dok se u isto vreme autonomno vozilo ne zamrzava i naglo ne koči. Da i Ne su irelevantni, zamenjeni su evaluacijom koja sadrži veliki broj opcija.
„Do sada su se često razmatrale tradicionalne etičke teorije da izvedu moralno dozvoljene odluke koje donose autonomna vozila. To je na kraju dovelo do ćorsokaka, jer u mnogim saobraćajnim situacijama nije bilo druge alternative osim kršenja jednog etičkog principa“, kaže Franziska Poszler, naučnik na Katedri za poslovnu etiku TUM-a. „Nasuprot tome, naš okvir stavlja etiku rizika u centar. Ovo nam omogućava da uzmemo u obzir verovatnoće da napravimo diferenciranije procene.“
Istraživači su naglasili činjenicu da čak i algoritmi koji se zasnivaju na etici rizika – iako mogu da donose odluke na osnovu osnovnih etičkih principa u svakoj mogućoj saobraćajnoj situaciji – još uvek ne mogu da garantuju ulični saobraćaj bez nezgoda. U budućnosti će dodatno biti potrebno razmotriti dalje diferencijacije kao što su kulturne razlike u etičkom donošenju odluka.
Do sada je algoritam razvijen u TUM-u bio validiran u simulacijama. U budućnosti će softver biti testiran na ulici korišćenjem istraživačkog vozila EDGAR. Kod koji obuhvata nalaze istraživačkih aktivnosti dostupan je kao softver otvorenog koda. TUM tako doprinosi razvoju održivih i sigurnih autonomnih vozila.


