Istraživanje koje je sproveo profesor Roderih Gros sa TU, zajedno sa kolegama sa Univerziteta u Šefildu, otkrilo je da roboti mogu efikasno navigirati kroz gužve ljudi koristeći različite strategije ponašanja, uključujući nezavisno, kooperativno i adaptivno kretanje. Ova studija, predstavljena na konferenciji Distributed Autonomous Robotic Systems (DARS 2024) u Njujorku, istražuje kako roboti mogu da deluju u ljudskim okruženjima, poput fabrika, bolnica i područja katastrofa, bezbedno i efikasno.
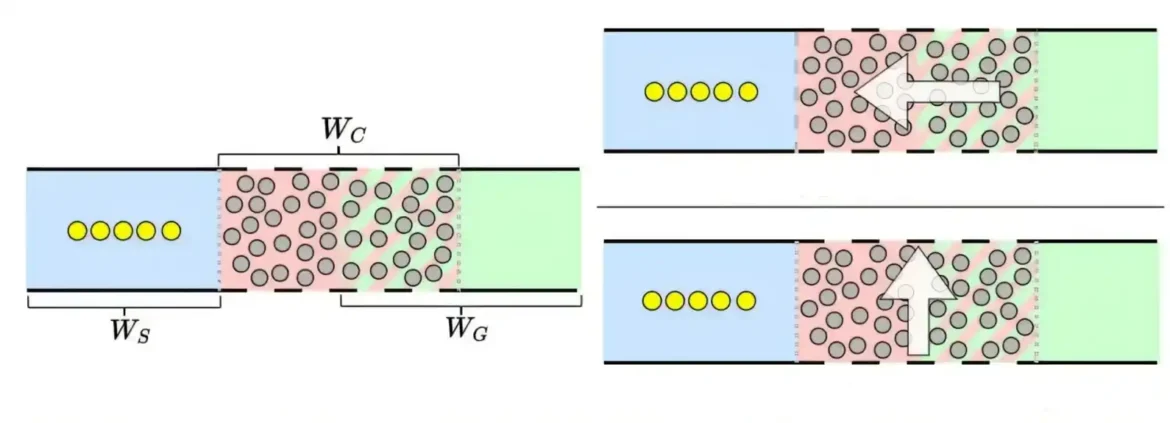
Istraživači su simulirali situacije u kojima su se roboti susretali sa različitim tipovima ljudi, uključujući one koji su stajali mirno, kretali se prema robotima ili im prelazili put. Tri strategije ponašanja su testirane: nezavisna strategija, u kojoj svaki robot samostalno pronalazi put, kooperativna strategija, u kojoj roboti formiraju red i prate jednog robota, i adaptivna strategija, koja kombinuje prethodne dve u zavisnosti od situacije.
Rezultati su pokazali da roboti koristeći kooperativnu strategiju izazivaju manje uznemiravanja u gustim gužvama, dok nezavisna strategija postaje efikasnija u situacijama s malo ljudi. Adaptivna strategija je, s druge strane, kombinovala prednosti oba pristupa i pokazala se posebno uspešnom u različitim scenarijima, smanjujući poremećaje u gomili.
Prema Jahiru Argote Gerald, prvom autoru studije, „strategija saradnje se pokazala efikasnom za robote koji se kreću kroz gužvu, uz dodatnu korist od održavanja komunikacione mreže među robotima“. Istraživači planiraju dalja istraživanja koja će omogućiti robotičkim sistemima da navigiraju kroz stvarne gužve, uz formalne garancije bezbednosti.
Ova inovacija predstavlja značajan korak ka integraciji robota u ljudske okruženja, sa potencijalom da unapredi efikasnost i sigurnost u raznim industrijama.


