Postizanje spretnosti na nivou čoveka tokom manipulacije i hvatanja je dugogodišnji cilj u robotici. Da bi se ovo postiglo, za robote je neophodno imati pouzdan osećaj za taktilne informacije i silu. Nedavna studija, objavljena u IEEE Robotics and Automation Letters, opisuje L3 F-TOUCH senzor koji poboljšava mogućnosti senzora sile klasičnih taktilnih senzora. Senzor je lagan, jeftin i bežični, što ga čini pristupačnom opcijom za naknadnu ugradnju postojećih robotskih ruku i hvataljki.
Ljudska ruka može da oseti pritisak, temperaturu, teksturu i bol. Pored toga, ljudska ruka može razlikovati predmete na osnovu njihovog oblika, veličine, težine i drugih fizičkih svojstava. Mnoge sadašnje robotske ruke ili hvataljke nisu ni blizu ljudskim rukama jer nemaju integrisane haptičke sposobnosti, što otežava rukovanje predmetima.
Bez znanja o silama interakcije i obliku predmeta kojim se rukuje, prsti robota ne bi imali nikakav „osećaj dodira“, a predmeti bi lako mogli da iskliznu iz prstiju robotske ruke ili čak da budu zgnječeni ako su krhki.
Studija, koju je vodio profesor Kaspar Althoefer sa Univerziteta Kueen Mari u Londonu, predstavlja novi L3 F-TOUCH—visoku rezoluciju senzora vrha prsta, gde L3 označava laganu, jeftinu, bežičnu komunikaciju. Senzor može da izmeri geometriju objekta i odredi sile za interakciju sa njim. Za razliku od drugih senzora koji procenjuju sile interakcije putem taktilnih informacija dobijenih slikama kamere, L3 F-TOUCH direktno meri sile interakcije, postižući veću tačnost merenja.
„Za razliku od svojih konkurenata koji procenjuju iskusne sile interakcije kroz rekonstrukciju sa slika kamere deformacije njihovog mekog elastomera, L-3 F-TOUCH meri sile interakcije direktno kroz integrisanu mehaničku strukturu vešanja sa sistemom ogledala čime se postiže veća tačnost merenja i širi opseg merenja“.
„Senzor je fizički dizajniran da odvoji merenja sile od informacija o geometriji. Zbog toga je primećena sila sa tri ose zaštićena od kontaktne geometrije u poređenju sa svojim konkurentima. Kroz ugrađenu bežičnu komunikaciju, senzor takođe nadmašuje konkurente u pogledu integrabilnosti sa rukama robota, “, kaže profesor Kaspar Althoefer.
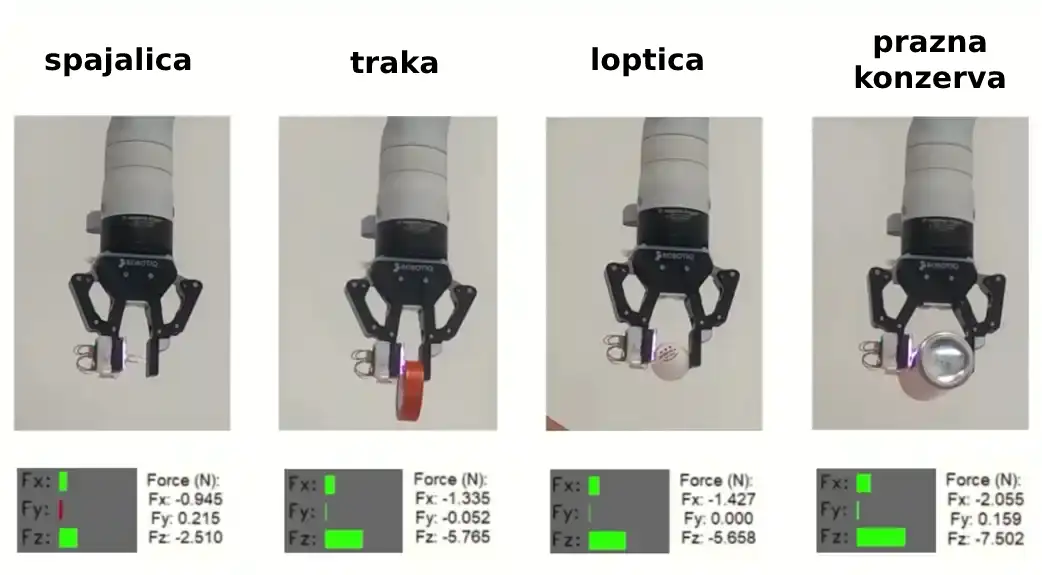
Kada senzor dodirne površinu, kompaktna struktura suspenzije omogućava da se elastomer — materijal sličan gumi koji se deformiše da bi izmerio kontaktnu geometriju visoke rezolucije izložen spoljnoj sili — pomeri pri kontaktu. Da bismo imali smisla u ovim podacima, pomeranje elastomera se prati otkrivanjem kretanja specijalnog markera, takozvanog ARTag, koji nam omogućava da merimo kontaktne sile duž tri glavne ose (k, i i z) putem procesa kalibracije .
„Fokusiraćemo naš budući rad na proširenje sposobnosti senzora za merenje ne samo sile duž tri glavne ose, već i rotacionih sila kao što je uvijanje, koje se mogu iskusiti tokom pričvršćivanja zavrtnjima, a da pritom ostanu precizne i kompaktne. Ova poboljšanja mogu omogućiti osećaj dodir za dinamičnije i agilnije robote u zadacima manipulacije, čak i u postavkama interakcije čoveka i robota, kao što je rehabilitacija pacijenata ili fizička podrška starijima“, dodaje profesor Althoefer.
Ovaj proboj bi mogao otvoriti put naprednijoj i pouzdanijoj robotici u budućnosti, jer sa senzorom L3 F-TOUCH, roboti mogu imati osećaj dodira, što ih čini sposobnijim za rukovanje objektima i obavljanje složenih zadataka manipulacije.