
Tim kanadskih i američkih istraživača pokazao je neverovatne rezultate prilikom restauracije starih korodiranih dagerotipa (veoma ranih tipova fotografija), pomoću tehnike poznate kao sinhrotronsko snimanje – korišćenjem rendgenskih zraka za precizno identifikovanje sastava materijala.
Kategorija: Tehnologija

Inženjeri kreiraju robota u obliku gusenice koji se deli na segmente, ponovo sastavlja
Inženjeri na Državnom univerzitetu Prinstona i Severne Karoline kombinovali su drevno savijanje papira i modernu nauku o materijalima kako bi stvorili mekog robota koji se sa lakoćom savija i uvija kroz lavirinte.
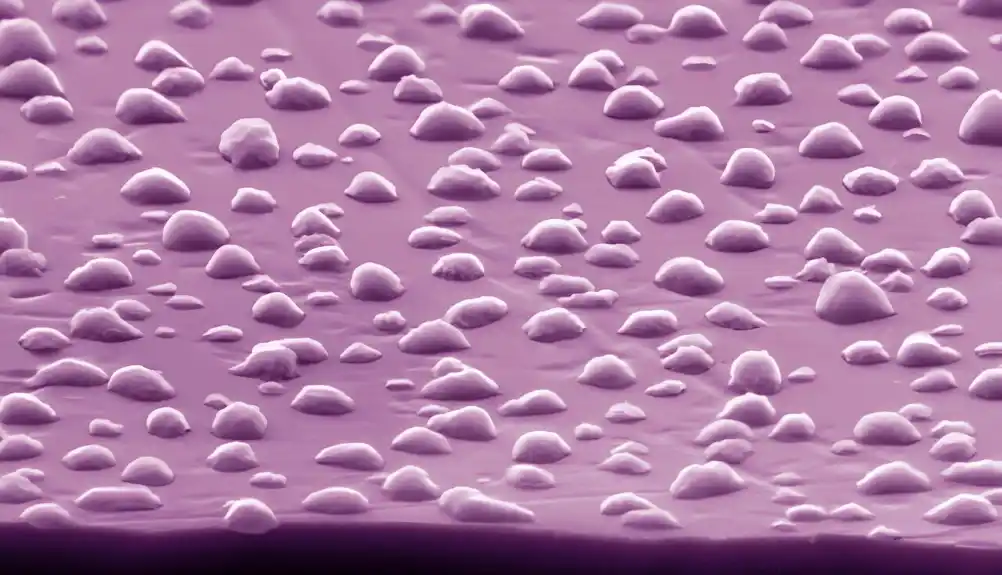
Nanostrukturirana bakarna površina pokazuje potencijal za transparentne, antimikrobne površine u ekranima na dodir
Interesovanje za antimikrobna rešenja za lične i višekorisničke ekrane osetljive na dodir, kao što su tableti i mobilni uređaji, poraslo je poslednjih godina. Tradicionalne metode kao što su alkoholi za prskanje ili maramice nisu idealne za ove delikatne ekrane. Antimikrobni premazi koji se nanose direktno na staklo su obećavajuća alternativa, ali samo ako su providni i dugotrajni.

Nova 6G bežična tehnologija je 500 puta brža od prosečnih 5G pametnih telefona
Peta generacija ili „5G“ povezivost za ćelijsku tehnologiju je standard za mreže tek oko pet godina, ali pošto je 6G već na vidiku, programeri traže načine da u potpunosti iskoriste prednosti ekspanzivnog propusnog opsega sledeće generacije.

Laser pobuđuje atomska jezgra za precizno merenje
Iako to ne možemo da vidimo, živimo u kvantizovanom svetu gde se svetlost koja osvetljava naše dane sastoji od sićušnih paketa energije, a atomi koji čine materiju su na sličan način podeljeni u diskretne energetske pojaseve.

Istraživači kreiraju tehnike verifikacije kako bi povećali sigurnost u AI i obradi slika
Tim istraživača sa Instituta IMDEA Softvare, Universidad Carlos III de Madrid i NEC Laboratories Europe uveo je novi okvir koji obećava da će poboljšati efikasnost i praktičnost proverljivog računarstva.
Firma za sajber bezbednost Darktrace prihvata ponudu od preko 5 milijardi dolara
Firma za sajber bezbednost Darktrace saopštila je u petak da je prihvatila ponudu za preuzimanje od 5,3 milijarde dolara američke privatne investicione kompanije Thoma Bravo, koja je istakla „sposobnost britanske grupe u veštačkoj inteligenciji“.

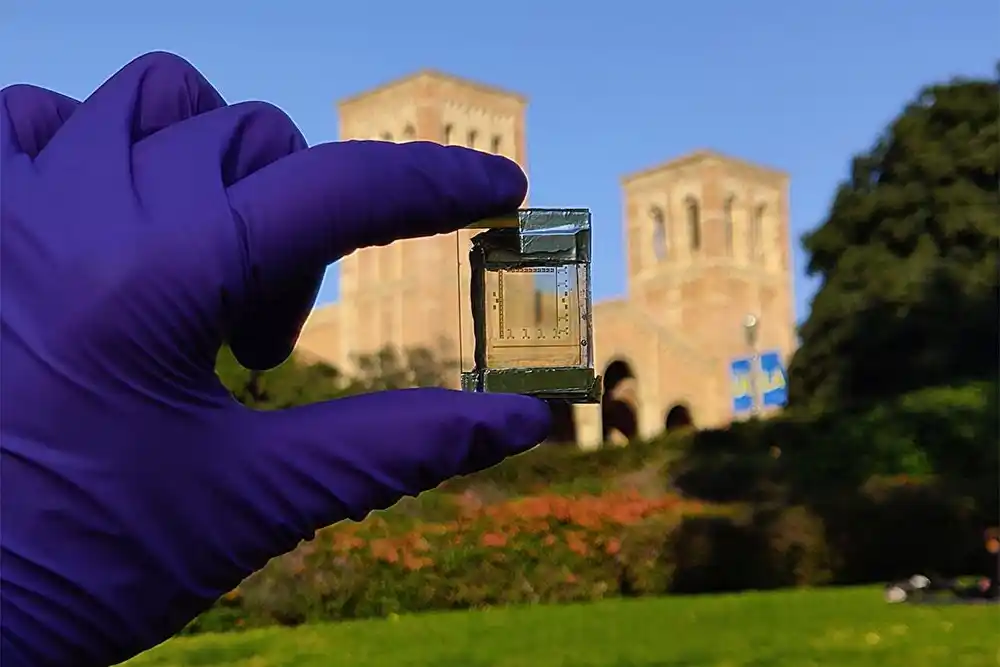
Korak napred za u razvoju „tandem“ solarnih ćelija
Kako stara poslovica kaže, bolje su dve glave od jedne. Isto važi i za solarne ćelije koje rade u tandemu. Istraživači u Nacionalnoj laboratoriji za obnovljivu energiju američkog Ministarstva energetike (NREL) pripremili su mapu puta kako da tandem solarne ćelije – posebno one koje spajaju različite fotonaponske tehnologije – pomerite bliže komercijalizaciji.

BiteDance kaže da „ne planira“ da prodaje TikTok nakon američkog zakona o zabrani
Kineski tehnološki gigant BiteDance rekao je da ne planira da prodaje TikTok nakon što mu je novi američki zakon stavio rok za odustajanje od veoma popularne video platforme ili zabranu u Sjedinjenim Državama.
TikTok će suzbiti sadržaj koji promoviše neuređenu ishranu i opasne navike gubitka težine
Rekavši da ne želi da promoviše negativna poređenja tela, TikTok razbija postove o neuređenoj ishrani, opasnim navikama za mršavljenje i potencijalno štetnim proizvodima za kontrolu težine.

Japansko antimonopolsko telo naređuje Guglu da popravi ograničenja pretrage oglasa koja utiču na Yahoo
Japanska antimonopolska agencija saopštila je u ponedeljak da američki pretraživač Gugl mora da popravi svoja ograničenja pretrage reklama koja utiču na Yahoo u Japanu.
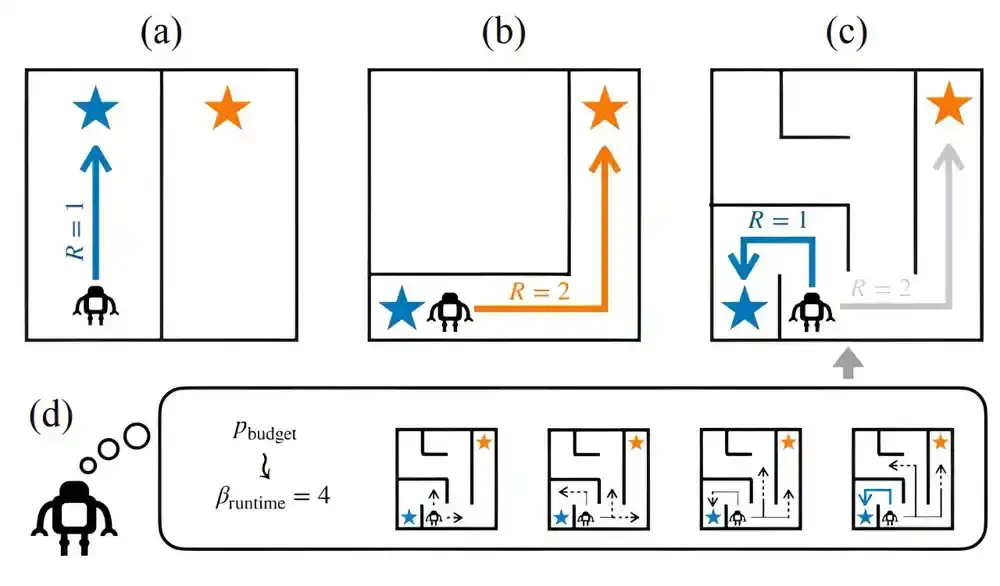
Da biste napravili boljeg AI pomoćnika, počnite modeliranjem iracionalnog ponašanja ljudi
Da bi se izgradili sistemi veštačke inteligencije koji mogu efikasno da sarađuju sa ljudima, za početak pomaže imati dobar model ljudskog ponašanja. Ali ljudi imaju tendenciju da se ponašaju neoptimalno kada donose odluke.

Gugl kombinuje svoje Android softverske i Pixel hardverske divizije da bi širio integraciju veštačke inteligencije
Gugl će kombinovati softversko odeljenje odgovorno za Android mobilni softver i Chrome pretraživač sa odeljenjem za hardver poznat po Pixel pametnim telefonima i Fitbit uređajima za nošenje, saopštila je kompanija u četvrtak. To je deo šireg plana za širu integraciju veštačke inteligencije u celoj kompaniji.
Sigurnosna ranjivost u interfejsu pretraživača omogućava pristup računaru preko grafičke kartice
Savremeni veb sajtovi postavljaju sve veće zahteve za računarskom snagom računara. Iz tog razloga, veb pretraživači takođe imaju pristup računarskim kapacitetima grafičke kartice (Graphics Processing Unit ili GPU) pored CPU-a računara već nekoliko godina.

Globalna isporuka pametnih telefona porasla za skoro 8% u prvom kvartalu pošto je Samsung ponovo preuzeo vođstvo
Globalne isporuke pametnih telefona porasle su za skoro 8% u prvom tromesečju, prema preliminarnim podacima kompanije International Data Corp. To je treći uzastopni kvartal rasta isporuke i označava povratak Samsunga na prvo mesto.

SAD će dati Samsungu do 6,4 milijarde dolara za fabrike čipova
Sjedinjene Države objavile su u ponedeljak grantove u iznosu do 6,4 milijarde dolara južnokorejskom poluprovodničkom gigantu Samsung za proizvodnju najsavremenijih čipova u Teksasu.
OpenAI dolazi u Aziju sa novom kancelarijom u Tokiju
Kreator ChatGPT-a OpenAI otvorio je u ponedeljak novu kancelariju u Tokiju, prvu azijsku ispostavu revolucionarne tehnološke kompanije koja ima za cilj da poveća svoju globalnu ekspanziju.
Napredak u računarstvu zasnovanom na svetlosti pokazuje mogućnosti za buduće pametne kamere
Istraživači koji razvijaju sledeću generaciju računarske tehnologije imaju za cilj da donesu malo svetla ovoj oblasti — bukvalno. Očekuje se da će optičko računarstvo, koje se oslanja na čestice svetlosti zvane fotoni, obezbediti alternative tradicionalnim elektronskim pristupima. Takvi sistemi — ili komponente hibridnih sistema zasnovane na svetlosti koje takođe zadržavaju elektronske delove — mogu biti brži, troše manje energije i efikasnije izračunavaju vizuelne informacije kroz istovremenu, paralelnu obradu.

Gugl povlači kalifornijske novinske sajtove zbog predloženog zakona
Gugl je u petak saopštio da testira uklanjanje linkova ka kalifornijskim novinskim sajtovima za neke korisnike u zapadnoj američkoj državi dok zakonodavci razmišljaju da nateraju internet pretraživača da plati za povezivanje ljudi sa vestima.

Apple planira da revidira celu Mac liniju sa M4 čipovima fokusiranim na veštačku inteligenciju
Apple Inc., sa ciljem da podstakne sporu prodaju računara, sprema se da revidira celu svoju Mac liniju novom porodicom internih procesora dizajniranih da istakne veštačku inteligenciju.