Uobičajene lutke za guranje u obliku životinja i popularnih figura mogu se pomeriti ili srušiti pritiskom na dugme na dnu baze igračaka. Sada je tim inženjera UCLA kreirao novu klasu podesivog dinamičkog materijala koji oponaša unutrašnje funkcionisanje push lutaka, sa aplikacijama za meku robotiku, rekonfigurabilne arhitekture i svemirski inženjering.
Unutar lutke za guranje nalaze se kablovi za povezivanje koji – kada se zategnu – čine da igračka stoji kruta. Ali otpuštanjem ovih užadi, „udovi“ igračke će mlohati. Koristeći isti princip zasnovan na napetosti kabla koji kontroliše lutku, istraživači su razvili novu vrstu metamaterijala, materijala projektovanog da poseduje svojstva sa obećavajućim naprednim mogućnostima.
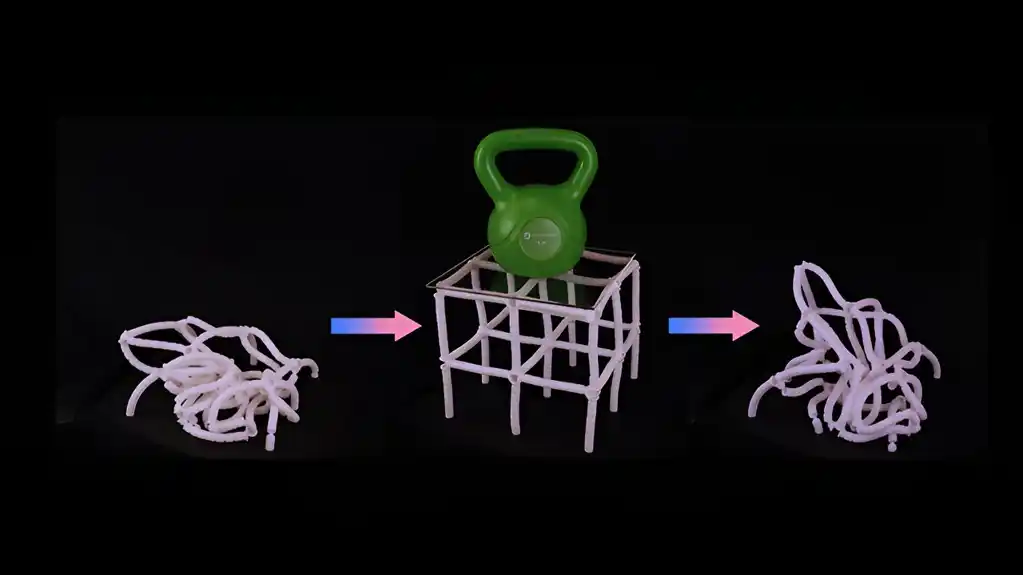
Objavljeno u Materials Horizons, studija pokazuje novi lagani metamaterijal, koji je opremljen ili motornim ili samoaktivirajućim kablovima koji su provučeni kroz perle sa konusnim vrhom. Kada se aktiviraju, užad se zategne, uzrokujući da se lanac za gnežđenje čestica perli zaglavi i ispravi u liniju, čineći da se materijal učvrsti dok zadržava svoju celokupnu strukturu.
Studija je takođe otkrila raznovrsne kvalitete materijala koji bi mogli dovesti do njegovog konačnog uključivanja u meku robotiku ili druge strukture koje se mogu rekonfigurisati:
„Naš metamaterijal omogućava nove mogućnosti, pokazujući veliki potencijal za njegovu inkorporaciju u robotiku, rekonfigurabilne strukture i svemirski inženjering,“ rekao je odgovarajući autor i postdoktorski naučnik sa UCLA Samueli School of Engineering Venzhong Ian. „Napravljen od ovog materijala, mekani robot koji se samostalno postavlja, na primer, mogao bi da kalibriše krutost svojih udova kako bi se prilagodio različitim terenima za optimalno kretanje uz zadržavanje strukture tela. Čvrsti metamaterijal takođe može pomoći robotu da podigne, gura ili povuče predmete. “
„Opšti koncept metamaterijala užeta otvara intrigantne mogućnosti za ugradnju mehaničke inteligencije u robote i druge uređaje“, rekao je Jan.
Viši autori u radu su Ankur Mehta, vanredni profesor elektrotehnike i računarstva sa UCLA Samueli i direktor Laboratorije za ugrađene mašine i sveprisutne robote, čiji je član Jan, i Džonatan Hopkins, profesor mašinstva i vazduhoplovstva koji vodi Fleksibilnu istraživačku grupu UCLA.
Prema istraživačima, potencijalne primene materijala uključuju i samomontažna skloništa sa školjkama koje obuhvataju sklopive skele. Takođe bi mogao da služi kao kompaktni amortizer sa mogućnostima programabilnog prigušenja za vozila koja se kreću kroz gruba okruženja.
„Gledajući unapred, postoji ogroman prostor za istraživanje mogućnosti krojenja i prilagođavanja promenom veličine i oblika perli, kao i načina na koji su one povezane“, rekao je Mehta, koji takođe ima imenovanje na fakultetu UCLA za mašinstvo i vazduhoplovstvo.
Dok su prethodna istraživanja istraživala kontrakcijske užadi, ovaj rad se bavio mehaničkim svojstvima takvog sistema, uključujući idealne oblike za poravnavanje perli, samosastavljanje i sposobnost da se podese da drže svoj opšti okvir.
Drugi autori rada su diplomirani studenti mašinstva UCLA Talmage Jones i Rian Lee—obojica članovi Hopkinsove laboratorije, i Christopher Javetz, diplomirani student Instituta za tehnologiju u Džordžiji koji je učestvovao u istraživanju kao član Hopkinsove laboratorije dok je bio na dodiplomskim studijama. student vazduhoplovnog inženjerstva na UCLA.


