Istraživači u Hibrid Robotics Group na UC Berkelei, Univerzitetu Simon Fraser i Institutu za tehnologiju Džordžije nedavno su kreirali model učenja pojačanja koji omogućava četvoronožnom robotu da efikasno igra fudbal u ulozi golmana. Model predstavljen u radu prethodno objavljenom na arKsiv-u, poboljšava veštine robota tokom vremena, kroz proces pokušaja i greške.
„Puštajući četvoronošcima da igraju fudbal, možemo da pomerimo granice veštačke inteligencije robota sa atletskim nogama“, Sjaoju Huang, Zhongju Li, Janžen Sjang, Jiming Ni, Jufeng Či, Junhao Li, Liži Jang, Ksue Binšil Peng i Kou Kou , rekli su za TechKsplore istraživači koji su sproveli studiju. „Golman je zanimljiv, ali izazovan zadatak koji zahteva od robota da reaguje na loptu koja se brzo kreće, ponekad leti u vazduhu, i presretne je koristeći dinamičke manevre u veoma kratkom vremenskom periodu (obično u roku od jedne sekunde). Rešavanjem ovoga , na taj način takođe možemo steći uvid o tome kako da kreiramo inteligentne i dinamične robote sa nogama.“
Ključni cilj nedavnog rada Huanga i njegovih kolega bio je stvaranje četvoronožnog robotskog golmana koji može usavršiti svoje veštine dok igra, baš kao što bi to uradio ljudski golman. Da bi to uradili, istraživači su razvili model učenja pojačanja koji obučava robota putem procesa pokušaja i greške, a ne kroz fiksnu strategiju koju je dizajnirao čovek.
„Robot prvo uči različite politike kontrole kretanja kako bi unapredio različite veštine, kao što su iskorak, ronjenje i skok, dok prati nasumične putanje za nožne prste robota“, objasnili su istraživači. „Na osnovu ovih kontrolnih smernica, robot zatim uči politiku planiranja na visokom nivou da odabere optimalnu veštinu i kretanje za presretanje lopte nakon ispitivanja otkrivene pozicije lopte i stanja robota.
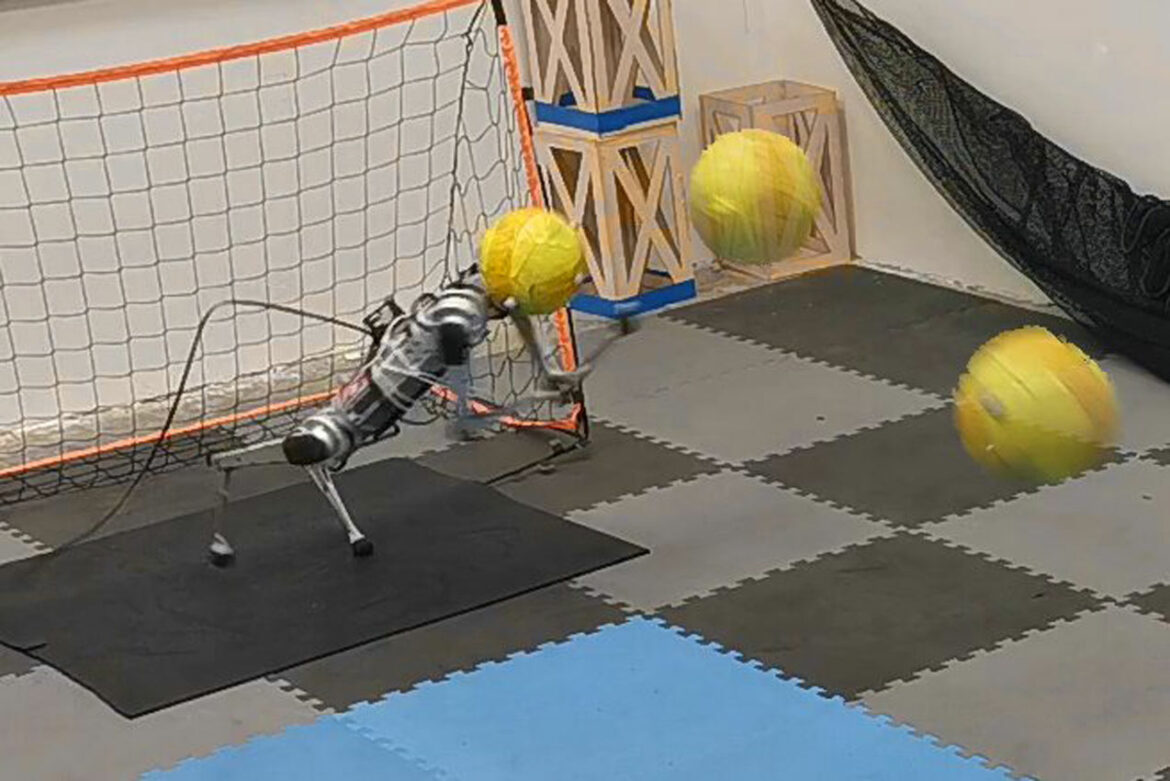
Istraživači su obučili svoj model učenja pojačanja u seriji simulacija fudbalskih utakmica. Nakon toga, primenili su politike koje su naučili na Mini Cheetah, pravom četvoronožnom robotu razvijenom na Tehnološkom institutu u Masačusetsu (MIT) i testirali njegove performanse u stvarnom svetu.
Utvrđeno je da okvir za učenje pojačanja koji su kreirali Huang i njegove kolege značajno poboljšava sposobnosti Mini Cheetah robota kao fudbalskog golmana. U testovima tima u stvarnom svetu, robot je uspeo da sačuva 87,5% od 40 nasumičnih snimaka.
„Mislim da je najbolji aspekt našeg rada to što je, koristeći našu predloženu metodu, četvoronožni robot Mini Cheetah u stanju da izvodi veoma dinamične i agilne veštine lokomocije, kao što su skakanje i ronjenje, kao i veštine brze i precizne manipulacije, kao što su kao odgurivanje lopte koristeći njene zamahne noge za vrlo kratko vreme“, rekli su istraživači. „Ovo zapravo pomera granice kretanja nogu, pokazujući da noga takođe može biti manipulator, baš kao što može biti i za ljude.“
U budućnosti, model učenja pojačanja koji je kreirao ovaj tim istraživača mogao bi se koristiti za poboljšanje performansi robota dizajniranih da učestvuju u RoboCup-u i drugim robotskim fudbalskim takmičenjima. Pored toga, njihov model bi se mogao koristiti za poboljšanje agilnosti i fizičkih sposobnosti četvoronožnih robota dizajniranih da se bave potpuno različitim zadacima, kao što su misije pretraživanja i spašavanja.
„Nadamo se da ćemo moći da omogućimo četvoronožnim robotima da se takmiče sa ljudskim fudbalerima u bliskoj budućnosti“, dodali su istraživači. „Roboti moraju da izvode veći izbor dinamičnih i agilnih pokreta i da postignu više inteligencije u fudbalskoj utakmici.


