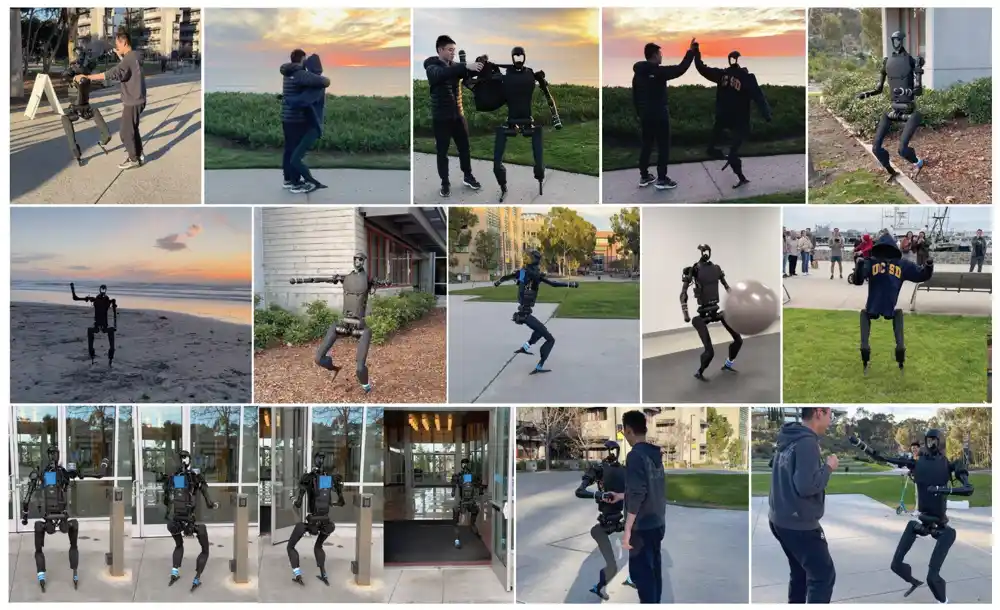
Inženjeri na Kalifornijskom univerzitetu u San Dijegu obučili su humanoidnog robota da bez napora uči i izvodi različite ekspresivne pokrete, uključujući jednostavne plesne rutine i gestove kao što su mahanje, davanje petice i grljenje, sve dok održava stabilan hod na različitim terenima.
Povećana ekspresivnost i agilnost ovog humanoidnog robota otvara put za poboljšanje interakcije čoveka i robota u okruženjima kao što su fabričke montažne linije, bolnice i domovi, gde roboti mogu bezbedno da rade zajedno sa ljudima ili čak da ih zamene u opasnim okruženjima kao što su laboratorije ili mesta katastrofe.
„Kroz ekspresivne pokrete tela više nalik ljudima, mi želimo da izgradimo poverenje i pokažemo potencijal robota da koegzistiraju u harmoniji sa ljudima“, rekao je Ksiaolong Vang, profesor na Odseku za elektrotehniku i računarstvo na UC San. Diego Jacobs School of Engineering. „Radimo na tome da pomognemo da preoblikujemo percepciju javnosti o robotima kao prijateljskim i saradničkim, a ne zastrašujućim poput Terminatora.“
Vang i njegov tim će predstaviti svoj rad na konferenciji Robotika: Nauka i sistemi 2024, koja će se održati od 15. do 19. jula u Delftu, Holandija.
Ono što ovog humanoidnog robota čini tako izražajnim je to što je obučen na različite pokrete ljudskog tela, što mu omogućava da generalizuje nove pokrete i imitira ih sa lakoćom. Slično kao student plesa koji brzo uči, robot može brzo da nauči nove rutine i gestove.
Da bi obučio svog robota, tim je koristio obimnu kolekciju podataka o snimanju pokreta i plesnih video zapisa. Njihova tehnika je uključivala odvojeno treniranje gornjeg i donjeg dela tela. Ovaj pristup je omogućio robotovom gornjem delu tela da replicira različite referentne pokrete, kao što su ples i petice, dok su se njegove noge fokusirale na ravnomerno iskoračenje kako bi održale ravnotežu i prešle različite terene.
„Glavni cilj ovde je da pokaže sposobnost robota da radi različite stvari dok hoda od mesta do mesta bez pada“, rekao je Vang.
Uprkos odvojenoj obuci gornjeg i donjeg dela tela, robot funkcioniše prema jedinstvenoj politici koja upravlja njegovom celokupnom strukturom. Ova koordinirana politika obezbeđuje da robot može da izvodi složene pokrete gornjim delom tela dok stabilno hoda po površinama kao što su šljunak, prljavština, iver, trava i nagnute betonske staze.
Simulacije su prvo sprovedene na virtuelnom humanoidnom robotu, a zatim prenete na pravog robota. Robot je pokazao sposobnost da izvede i naučene i nove pokrete u uslovima stvarnog sveta.
Trenutno, pokrete robota usmerava čovek-operater koristeći kontroler igre, koji diktira njegovu brzinu, pravac i specifične pokrete. Tim predviđa buduću verziju opremljenu kamerom koja će robotu omogućiti da obavlja zadatke i da se kreće po terenu potpuno autonomno.
Tim je sada fokusiran na usavršavanje dizajna robota kako bi se pozabavio složenijim i detaljnijim zadacima. „Proširujući mogućnosti gornjeg dela tela, možemo proširiti opseg pokreta i gesta koje robot može da izvede“, rekao je Vang.


