Tim istraživača sa Univerziteta nauke i tehnologije Huazhong predstavio je inovativnog robota za nadzor koji prati ljude dizajniran da pomogne osobama sa slabošću mišića donjih ekstremiteta, stanjem koje preovlađuje među starijim osobama i onima koji pate od neuroloških bolesti i bolesti motornog sistema. Ova najsavremenija tehnologija obećava da će poboljšati dnevnu mobilnost i ubrzati oporavak, nudeći značajan podsticaj naporima za rehabilitaciju.
Rad je objavljen u časopisu Kiborg i bionički sistemi.
Razvoj robota za nadzor, detaljno opisan u nedavnoj studiji koju su objavili Meiping Zhang i kolege, rešava kritične nedostatke u trenutnoj tehnologiji rehabilitacije fokusirajući se na kontinuirano i tačno prepoznavanje namera i efikasno praćenje robota tokom procesa rehabilitacije. Sa rastućom globalnom starijom populacijom, potreba za takvim naprednim rešenjima postala je hitnija, sa procenjenim da je oko 400 miliona starijih ljudi širom sveta pogođeno gubitkom mišića.
Sa starenjem globalne populacije, prevalencija slabosti mišića donjih ekstremiteta je u porastu, što pogađa oko 400 miliona starijih ljudi širom sveta. Ovo stanje, koje je često posledica bolesti neurološkog i motoričkog sistema, značajno narušava pokretljivost i samostalnost.
Pravovremene i efikasne rehabilitacione intervencije su ključne za oporavak i reintegraciju u društvo. Pomoćni roboti, koji se sve više istražuju, nude obećavajuće rešenje za smanjenje opterećenja zdravstvenih sistema i poboljšanje nezavisnosti pacijenata.
Robot koristi novi algoritam za procenu namera ljudskog hodanja zasnovan na filtriranju skupova članova sa nepotpunim posmatranjem, što mu omogućava da održi efikasnu podršku čak i kada su signali pokreta prekinuti, kao što je blokada prenosa podataka ili okluzija tela. Ovo je ključno za obezbeđivanje da se robot može kontinuirano prilagođavati korisnikovom tempu i nameravanoj putanji, pružajući podršku tačno kada i gde je to potrebno.
Pored svojih naprednih mogućnosti prepoznavanja namera, robot koristi kontrolni algoritam koji prati čoveka koji obezbeđuje da ostane unutar propisane udaljenosti i orijentacije u odnosu na korisnika. Ovo ne samo da omogućava neprekidnu podršku već i sprečava robota da ometa put korisnika, čime se povećava udobnost i bezbednost korisnika tokom upotrebe.
Eksperimenti istraživačkog tima su pokazali efikasnost ovih tehnologija. Robot je uspešno kretao složenim stazama za hodanje, održavajući blisku, ali bezbednu udaljenost od korisnika, prilagođavajući svoje kretanje u realnom vremenu na osnovu korisnikovih namera za hodanje i uslova okoline.
„Naš robot ne samo da pruža fizičku podršku, već i integriše napredne algoritme kako bi se osiguralo da se može prilagoditi različitim potrebama korisnika i okruženjima“, rekao je Jian Huang, stariji autor studije. „To predstavlja značajan korak napred u pomoćnoj tehnologiji za rehabilitaciju, nudeći potencijalne primene u drugim oblastima kao što su logistika, pomoć u domaćinstvu, pa čak i rekreativne aktivnosti.
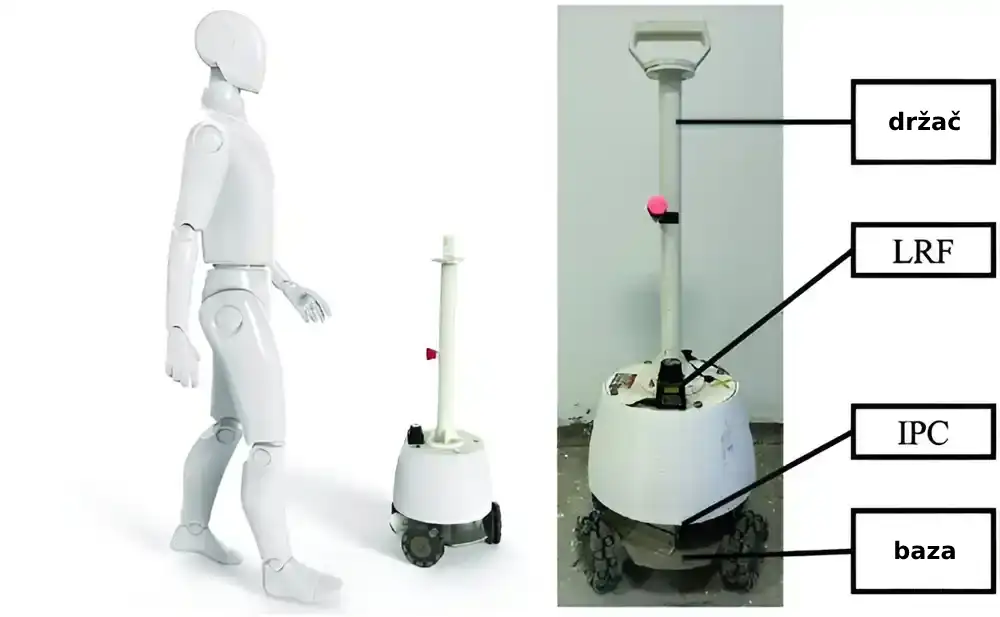
Tehnologija koju su razvili Zhang i njen tim posebno je pogodna za pacijente u ranim fazama opadanja mišićne snage, koji mogu samostalno da hodaju, ali im je potrebno praćenje kako bi sprečili padove. Dizajn robota uključuje delove koji se lako pomeraju, interfejs za interakciju čovek-robot i rukohvat za podršku ravnoteži, što je sve ključno za poboljšanje mobilnosti i kvaliteta života korisnika.
Istraživači su optimistični u pogledu budućih poboljšanja ove tehnologije, uključujući integraciju naprednijih senzora i algoritama za dalje poboljšanje odziva i primenljivosti robota u različitim okruženjima. Krajnji cilj je stvaranje robota koji ne samo da podržavaju mobilnost, već i aktivno doprinose procesu rehabilitacije poboljšavajući funkciju mišića i koordinaciju.


