Robotski sistemi istražuju nepoznati teren, zgrade ili opasne zone pomoću kamera. U projektu 3D-InAus, istraživači sa Fraunhofer instituta za komunikaciju, obradu informacija i ergonomiju FKIE koriste LiDAR laser na mobilnom robotu, emitujući laserske impulse za merenje udaljenosti. Rezultati se koriste za proizvodnju geometrijski tačnih 3D okruženja.
U slučaju katastrofe kao što je incident u hemijskoj fabrici ili poplava, hitnim službama su potrebni načini da brzo dobiju pregled situacije. Ali u mnogim slučajevima im nije dozvoljeno da uđu na samu scenu kako bi izbegli da se izlože riziku.
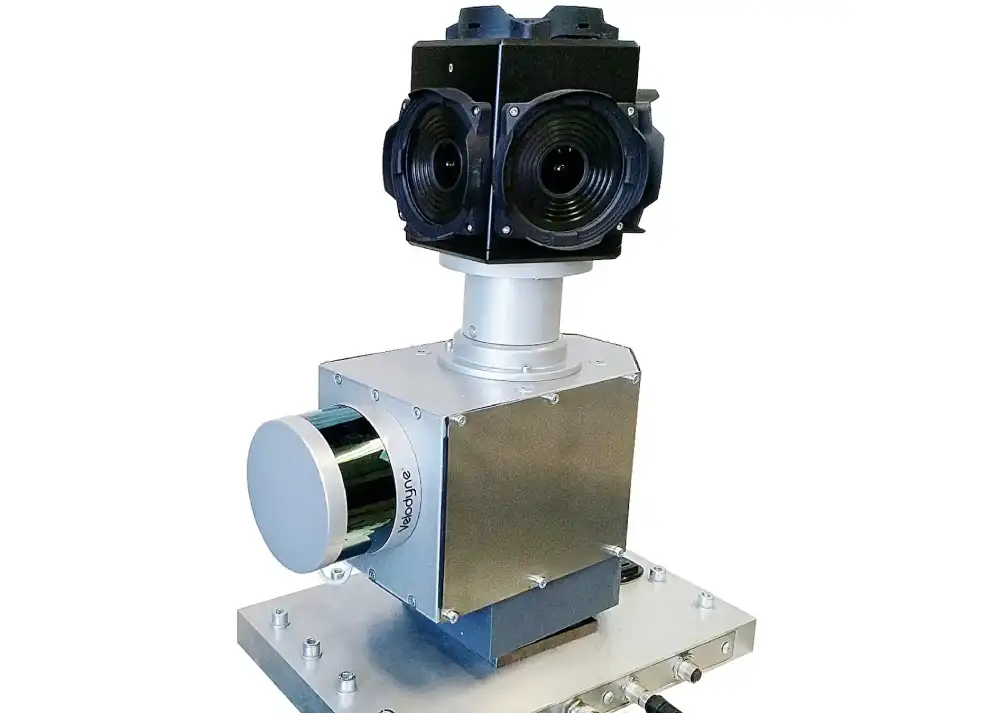
Istraživači u Fraunhofer FKIE u Vahtbergu rade na rešenju ovog problema u projektu 3D-InAus. Robot opremljen laserom LiDAR (detekcija svetlosti i dometa) istražuje područje. LiDAR tehnologija koristi impulse svetlosti za skeniranje okoline i merenje udaljenosti. Ovo stvara 3D model koji prikazuje zgrade, sobe, otvoreni prostor, objekte i sve povezane dimenzije i udaljenosti. Korisnici mogu slobodno da se kreću po vizuelizaciji od 360 stepeni koristeći džojstik dok istražuju virtuelno okruženje.
Timo Rohling, tehnički menadžer projekta iz odeljenja za kognitivne mobilne sisteme, objašnjava: „U poređenju sa robotskim sistemima koji koriste kamere za istraživanje opasne zone, naš projekat ide veliki korak dalje. Laserski impulsi obezbeđuju merenja za preciznu 3D kartografiju područja Udaljenosti i dimenzije se ne procenjuju, već se određuju sa tačnošću do samo nekoliko centimetara.“
Centralni deo hardvera je LiDAR laser montiran na gramofon. Rotirajuće ogledalo je ugrađeno u LiDAR modul. Može da skenira oblast sastavljenu od 16 vertikalnih delova, ili „kriški“, 10 puta u sekundi. Gramofon rotira laser tako da vertikalni delovi pokrivaju ceo pogled od 360 stepeni duž horizontalne ose.
Sistem generiše ukupno 1,3 miliona laserskih impulsa u sekundi. Ovi impulsi se odbijaju od okolnih objekata, a vremensko kašnjenje između njih se koristi za izračunavanje relevantne udaljenosti. LiDAR modul je montiran na vozilo koje se kreće kroz područje, bilo neprekidno ili u režimu zaustavljanja i pokreta.
Kontinuirani rad je mnogo brži, ali i manje tačan. Rezultat je 3D oblak tačaka u kome svaka tačka predstavlja laserski puls ili merenje udaljenosti. Tu je i sistem kamera sa do šest kamera. Slike sa kamera se koriste za bojenje povezanih objekata ili oblika.
„Možda biste pomislili da spajamo slike kamere i oblak tačaka. Ovo nam daje živopisno, detaljno i takođe geometrijski tačno 3D okruženje koje prikazuje zgrade, otvoreni prostor i objekte,“ kaže Rohling.
Neobrađene podatke dobijene LiDAR laserom prethodno obrađuje kompjuterski modul unutar robota pre nego što on uopšte završi svoju misiju. Konačna vizualizacija se zatim proizvodi na stacionarnoj osnovi tokom naknadne obrade. Za mapiranje područja veličine 400 k 400 m potrebno je oko tri sata. U katastrofi kada je vreme od suštinskog značaja, ubrzani rad se može koristiti za dobijanje početnog pregleda za samo jedan sat. Takođe je moguće istražiti područje koristeći više vozila istovremeno.
Ova metoda 3D mapiranja je takođe dragocena za Bundesver, koji je naručio istraživački projekat. Može se koristiti za generisanje složenih situacionih pregleda nepoznatog terena ili opasne zone i na taj način spasiti živote pripadnika servisa. Softver sistema je u stanju da obradi merne vrednosti sa senzora koji detektuju gasovite toksične supstance ili izvore zračenja i zatim ih postavi na 3D mape.
Sistem robota je obično radio-kontrolisan od strane korisnika koji radi sa džojstikom i tabletom. Ako nema radio kontakta, robotski sistemi bi se takođe mogli samostalno kretati po terenu.
Istraživanje zgrada je izazov, jer tamo nema GPS prijema, ali su istraživači iz Fraunhofer FKIE pronašli rešenje i za ovo. Položaj i veličina zgrade su već poznati iz mapiranja terena, a softver koristi te informacije da generiše virtuelni GPS za unutrašnjost zgrade. To omogućava robotskom sistemu da se samostalno kreće i unutar strukture.
Tim iz Fraunhofer FKIE koristio je svoju dugogodišnju stručnost u modeliranju 3D okruženja uz pomoć robota za svoj rad na projektu. „Došli smo do koncepta, odabrali komponente i implementirali algoritme“, objašnjava Rohling.
Tim je pazio da robotski sistem bude što je moguće raznovrsniji. Laserski modul i gramofon mogu se montirati na širok spektar različitih vozila, na primer. U zavisnosti od terena, mogla su se koristiti vozila sa točkovima ili gusenicama ili čak dronovi. Korisnici sastavljaju specifične komponente da odgovaraju svakom scenariju.


