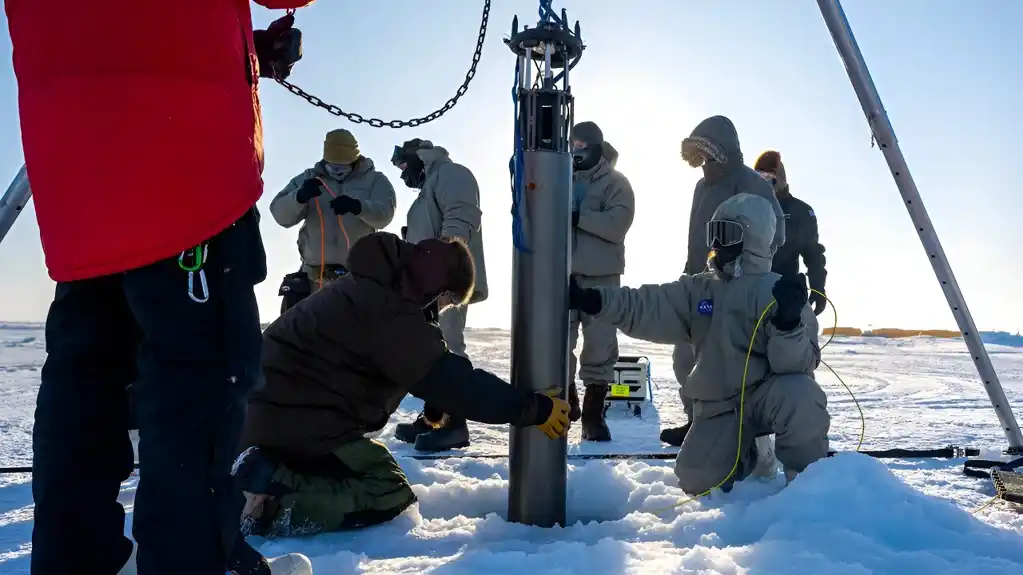
Na udaljenom delu vetrovitog, smrznutog Boforovog mora severno od Aljaske, inženjeri iz NASA-ine Laboratorije za mlazni pogon u južnoj Kaliforniji zbili su se zajedno, vireći niz usku rupu u debelom sloju morskog leda. Ispod njih, cilindrični robot je skupljao naučne podatke o testovima u hladnom okeanu, spojen vezom sa stativom koji ga je spustio kroz bušotinu.
Ovaj test je inženjerima dao priliku da upravljaju svojim prototipom robota na Arktiku. To je takođe bio korak ka konačnoj viziji njihovog projekta, nazvanog IceNode: flota autonomnih robota koji bi se upustili ispod antarktičkih ledenih polica kako bi pomogli naučnicima da izračunaju koliko brzo smrznuti kontinent gubi led – i koliko brzo bi to topljenje moglo da izazove globalno more. nivoi da rastu.
Ako se potpuno otopi, ledeni pokrivač Antarktika bi podigao globalni nivo mora za oko 200 stopa (60 metara). Njegova sudbina predstavlja jednu od najvećih neizvesnosti u projekcijama porasta nivoa mora. Baš kao što temperature vazduha koje se zagrevaju izazivaju topljenje na površini, led se takođe topi kada je u kontaktu sa toplom okeanskom vodom koja cirkuliše ispod.
Da bi poboljšali kompjuterske modele koji predviđaju porast nivoa mora, naučnicima su potrebne preciznije stope topljenja, posebno ispod ledenih polica – miljama dugih ploča plutajućeg leda koje se protežu od kopna. Iako ne doprinose direktnom porastu nivoa mora, ledene police ključno usporavaju tok ledenih pokrivača prema okeanu.
Izazov: Mesta na kojima naučnici žele da izmere topljenje su među najnepristupačnijim na Zemlji. Konkretno, naučnici žele da ciljaju podvodno područje poznato kao „zona prizemljenja“, gde se susreću plutajuće ledene police, okean i kopno – i da zavire duboko u nemapirane šupljine gde se led možda najbrže topi. Podmukli pejzaž koji se stalno menja iznad je opasan za ljude, a sateliti ne mogu da vide ove šupljine, koje su ponekad ispod kilometarske leda. IceNode je dizajniran da reši ovaj problem.
„Razmišljali smo kako da prevaziđemo ove tehnološke i logističke izazove godinama i mislimo da smo pronašli način“, rekao je Ian Fenti, naučnik za klimu JPL-a i naučni rukovodilac IceNode-a. „Cilj je dobijanje podataka direktno na interfejsu za topljenje leda i okeana, ispod ledene police.“
Koristeći svoju stručnost u dizajniranju robota za istraživanje svemira, IceNode-ovi inženjeri razvijaju vozila dugačka oko 2,4 metra i prečnika 25 centimetara, sa tronožnim „stajnim trapom“ koji izvire sa jednog kraja za pričvršćivanje robot na donju stranu leda. Roboti nemaju nikakav oblik pogona; umesto toga, oni bi se autonomno pozicionirali uz pomoć novog softvera koji koristi informacije iz modela okeanskih struja.
Ispušteni iz bušotine ili plovila u otvorenom okeanu, roboti bi se vozili tim strujama na dugom putovanju ispod ledene police. Kada bi stigli do svojih ciljeva, svaki robot bi ispustio svoj balast i ustao da se pričvrsti na dno leda. Njihovi senzori bi merili koliko brzo topla, slana okeanska voda kruži da bi otopila led, i koliko brzo hladnija, svežija otopljena voda tone.
IceNode flota bi radila do godinu dana, kontinuirano hvatajući podatke, uključujući sezonske fluktuacije. Zatim bi se roboti odvojili od leda, odneli nazad u otvoreni okean i preneli svoje podatke preko satelita.
„Ovi roboti su platforma za dovođenje naučnih instrumenata na najteže dostupne lokacije na Zemlji“, rekao je Pol Glik, inženjer robotike JPL i glavni istraživač IceNode-a. „To treba da bude bezbedno, relativno jeftino rešenje za težak problem.“
Iako predstoji dodatni razvoj i testiranje za IceNode, dosadašnji rad je obećavao. Nakon prethodnih raspoređivanja u kalifornijskom zalivu Monterej i ispod zaleđene zimske površine jezera Superior, putovanje u Bofortovo more u martu 2024. ponudilo je prvi polarni test. Temperature vazduha od minus minus 45 Celzijusa izazvale su podjednako ljude i robotski hardver.
Test je sproveden kroz dvogodišnji Ice Camp Laboratorije za arktičke podmornice američke mornarice, tronedeljnu operaciju koja istraživačima pruža privremeni bazni kamp iz kojeg će obavljati terenski rad u arktičkom okruženju.
Dok se prototip spuštao oko 100 metara u okean, njegovi instrumenti su prikupljali podatke o slanosti, temperaturi i protoku. Tim je takođe sproveo testove kako bi odredio podešavanja koja su potrebna da bi se robot u budućnosti isključio.
„Zadovoljni smo napretkom. Nadamo se da ćemo nastaviti sa razvojem prototipova, vratiti ih na Arktik za buduća testiranja ispod morskog leda i na kraju videti kompletnu flotu raspoređenu ispod antarktičkih ledenih polica“, rekao je Glik. „Ovo su vredni podaci koji su naučnicima potrebni. Sve što nas približava ostvarenju tog cilja je uzbudljivo.“


