Prvu statistički realističnu simulaciju puta razvili su istraživači sa Univerziteta u Mičigenu. Iako trenutno predstavlja posebno opasan kružni tok, budući rad će ga proširiti na druge situacije vožnje za testiranje softvera za autonomno vozilo.
Simulacija je model mašinskog učenja koji se obučavao na osnovu podataka prikupljenih na kružnom toku na južnoj strani Ann Arbora, prepoznatoj kao jedna od raskrsnica sa najvećim rizikom od sudara u državi Mičigen i pogodno samo nekoliko kilometara od kancelarija istraživačkog tima.
Poznato kao Neural Naturalistic Driving Environment ili NeuralNDE, pretvorilo je te podatke u simulaciju onoga što vozači svakodnevno doživljavaju. Ovakvi virtuelni putevi su potrebni da bi se obezbedila bezbednost softvera za autonomno vozilo pre nego što mu drugi automobili, biciklisti i pešaci ikada pređu put.
„NeuralNDE reprodukuje okruženje za vožnju i, što je još važnije, realno simulira ove bezbednosno kritične situacije kako bismo mogli da procenimo bezbednosne performanse autonomnih vozila“, rekao je Henri Liu, profesor građevinarstva U-M i direktor Mcitija.
Liu je takođe direktor Centra za povezani i automatizovani transport i odgovarajući autor studije u Prirodnim komunikacijama. Publikacija je istaknuta kao glavni urednik.
Događaji kritični za bezbednost, koji zahtevaju od vozača da donese odluke u deliću sekunde i preduzme akciju, ne dešavaju se tako često. Vozači mogu da prolaze mnogo sati između događaja koji ih primoravaju da pritisnu kočnice ili skrenu da bi izbegli sudar, a svaki događaj ima svoje jedinstvene okolnosti.
Zajedno, ovo predstavlja dva uska grla u nastojanju da se simuliraju naši putevi, poznati kao „prokletstvo retkosti“ i „prokletstvo dimenzionalnosti“, respektivno. Prokletstvo dimenzionalnosti je uzrokovano složenošću okruženja za vožnju, koje uključuje faktore kao što su kvalitet kolovoza, trenutni vremenski uslovi i različite vrste učesnika u saobraćaju, uključujući pešake i bicikliste.
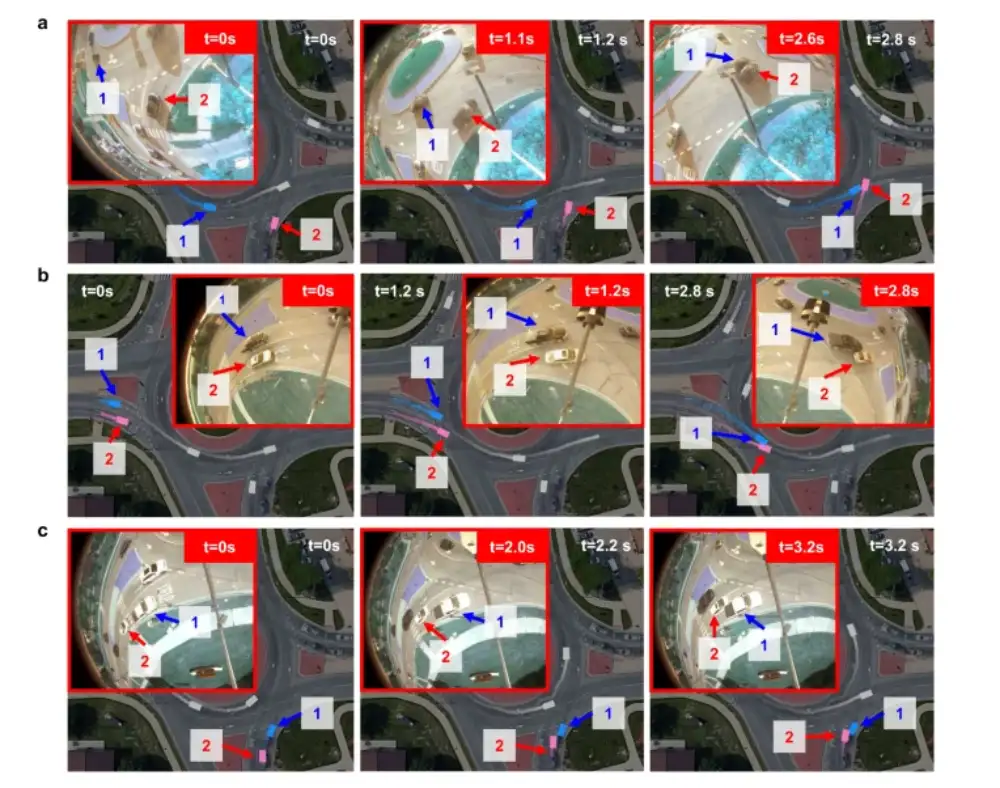
Da bi sve to modelirao, tim je pokušao da sve to vidi. Instalirali su senzorske sisteme na rasvetnim stubovima koji kontinuirano prikupljaju podatke na kružnom toku State Street/Ellsvorth Road.
„Razlog zbog kojeg smo odabrali tu lokaciju je taj što su kružne raskrsnice veoma izazovan scenario urbane vožnje za autonomna vozila. U kružnom toku, od vozača se zahteva da spontano pregovaraju i sarađuju sa drugim vozačima koji se kreću kroz raskrsnicu. Osim toga, ovaj kružni tok doživljava veliki obim saobraćaja i dve trake, što doprinosi njegovoj složenosti“, rekao je Ksintao Ian, dr. student građevinarstva i inženjerstva životne sredine i prvi autor studije, koju savetuje Liu.
NeuralNDE služi kao ključna komponenta CCAT Safe AI Framevork-a za Trustvorthi Edge Scenario Tests, ili SAFE TEST, sistema koji je razvio Liuov tim koji koristi veštačku inteligenciju da smanji kilometre testiranja potrebne da bi se osigurala bezbednost autonomnih vozila za 99,99%.
To u suštini razbija „prokletstvo retkosti“, uvodeći incidente kritične za bezbednost hiljadu puta češće nego što se dešavaju u stvarnoj vožnji. NeuralNDE je takođe ključan za projekat dizajniran da omogući da se Mciti Test Faciliti koristi za daljinsko testiranje AV softvera.
Ali za razliku od potpuno virtuelnog okruženja, ovi testovi se odvijaju u mešovitoj stvarnosti na zatvorenim ispitnim stazama kao što su Mciti Test Faciliti i Američki centar za mobilnost u Ipsilantiju, Mičigen. Osim stvarnih uslova na stazi, autonomna vozila doživljavaju i virtuelne vozače, bicikliste i pešake koji se ponašaju na bezbedan i opasan način. Testiranjem ovih scenarija u kontrolisanom okruženju, AV programeri mogu fino da podese svoje sisteme kako bi se bolje nosili sa svim situacijama u vožnji.
NeuralNDE nije koristan samo za AV programere, već i za istraživače koji proučavaju ponašanje vozača. Simulacija može da tumači podatke o tome kako vozači reaguju na različite scenarije, što može pomoći u razvoju funkcionalnije putne infrastrukture.


