Istraživači su razvili lagani fluidni motor za pogon mekih robota koji oponašaju mišiće za upotrebu u pomoćnim uređajima. Ono što izdvaja novi motor je njegova sposobnost da generiše značajnu silu bez vezivanja za spoljni izvor napajanja.
„Mekani roboti koji se pokreću fluidnim motorima – kao što su hidraulični ili pneumatski – mogu se koristiti za oponašanje ponašanja mišića na način na koji kruti roboti ne mogu“, kaže Hao Su, odgovarajući autor rada o radu i vanredni profesor mašinstva i vazduhoplovstva na Državnom univerzitetu Severne Karoline.
„Ovo ove robote čini posebno atraktivnim za upotrebu u pomoćnim uređajima koji poboljšavaju sposobnost ljudi da pomeraju svoje gornje ili donje udove.“
Međutim, većina fluidnih motora je fizički povezana sa spoljnim izvorom napajanja, kao što je veliki vazdušni kompresor. To značajno ograničava njihovu korisnost. A prethodni motori sa fluidima koji nisu bili vezani za spoljne izvore energije nisu bili u stanju da generišu mnogo sile, što je takođe ograničavalo njihovu korisnost.
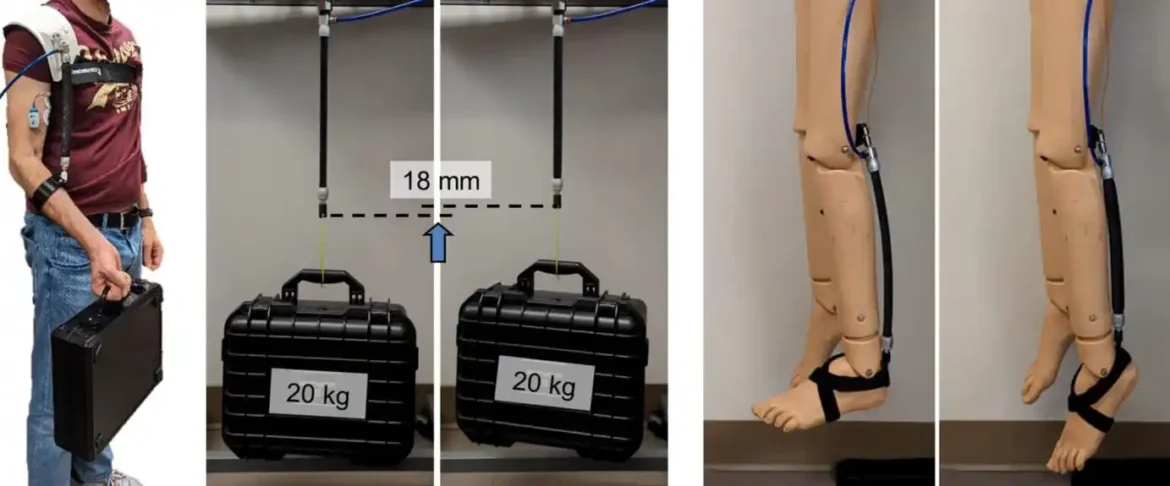
„Naš rad ovde se bavi oba ova izazova“, kaže Su. „Naš fluidni motor nije vezan za spoljni izvor, ali i dalje može da generiše do 580 Njutna sile.
Novi motor funkcioniše tako što pumpa ulje u i iz komore u mekom robotu, uzrokujući da meki robot deluje kao veštački mišić koji se savija i opušta. Pumpu fluidnog motora pokreće motor visokog obrtnog momenta na baterije koji joj omogućava da generiše značajan pritisak, omogućavajući veštačkom mišiću da izvrši značajnu silu.
U testiranju dokaza o konceptu, istraživači ne samo da su procenili količinu sile koju novi motor može da generiše, već i koliko efikasno motor pretvara električnu energiju u fluidnu snagu.
„Otkrili smo da smo uspeli da generišemo neviđenu količinu sile za nevezani motor, a da i dalje držimo nisku težinu fluidnog motora“, kaže Antonio Di Lalo, prvi autor rada i postdoktorski istraživač u NC State.
„A maksimalna efikasnost našeg fluidnog motora je veća od prethodnih prenosivih, nevezanih motora.“
Rad, „Nevezani fluidni motor za meke nosive robote velike snage“, objavljen je u otvorenom pristupu u časopisu Advanced Intelligent Sistems.


