Istraživači sa Univerziteta Purdue i Tehnološkog instituta u Masačusetsu (MIT) razvili su novu robotsku hvataljku koja kombinuje jednostavan dizajn sa naprednim funkcionalnostima, omogućavajući efikasnu manipulaciju objektima sa manjim brojem stepeni slobode (DOF) nego što je uobičajeno kod humanoidnih robotskih ruku. Ovaj alat, opisan u najnovijem radu objavljenom na arXiv serveru za preprint, pokazuje značajan potencijal za unapređenje robotske manipulacije u stvarnom svetu.
Trenutno, sofisticirane robotske ruke sa visokim DOF-om omogućavaju kompleksne manipulacije, ali su često skupe i teške za programiranje. S druge strane, tradicionalne hvataljke sa paralelnim čeljustima su lakše za kontrolu, ali su ograničene u svojoj sposobnosti za obavljanje složenih manipulacija. Novi dizajn hvataljke razvijen od strane istraživača iz Purdue-a i MIT-a premošćuje ovu razliku, nudeći jednostavnost dizajna i efikasnost u manipulaciji.
Karakteristike novog hvatača:
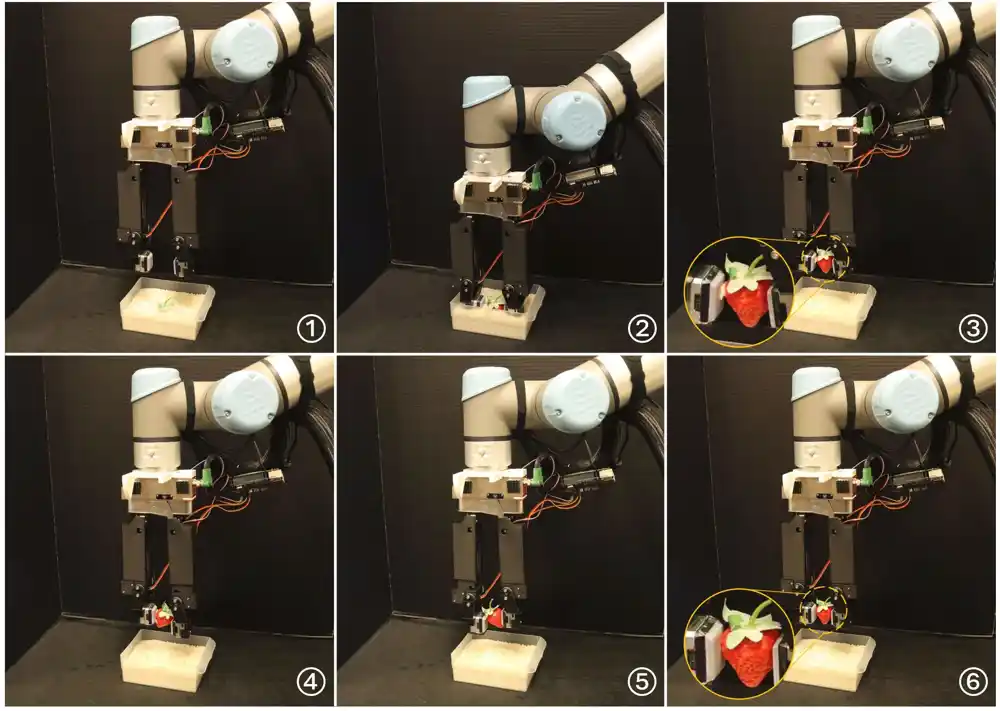
- 5 DOF: Hvataljka se sastoji od dva prsta, svaki sa linearnim aktuatorom i rotacionim servo motorom, omogućavajući visoki stepen fleksibilnosti u manipulaciji.
- Taktilni senzor zasnovan na vidu: GelSight mini senzor je montiran na vrhu levog prsta, pružajući detaljne informacije o geometriji, orijentaciji i sili hvatanja objekta.
- Jednostavan dizajn: Iako ima manje stepeni slobode, hvataljka pokazuje visok nivo spretnosti i može efikasno obavljati složene zadatke manipulacije.
Rezultati istraživanja: Istraživači su testirali hvataljku u različitim stvarnim uslovima i otkrili da je uspešna u obavljanju osnovnih veština manipulacije. Na primer, hvataljka je mogla da izvede zadatak sličan trljanju čestica peska između objekta i prstiju, što je uobičajena radnja kod ljudi prilikom skupljanja školjki.
Potencijalne primene i budući rad: Nova hvataljka bi mogla da se koristi za složenije zadatke manipulacije, uključujući rad sa deformabilnim linearnim objektima. Njena jednostavnost u dizajnu i funkcionalnosti može dovesti do robusnijih, isplativijih i energetski efikasnijih robotskih rešenja koja su lakša za implementaciju i održavanje.
„Planiramo da proširimo primenu ove hvataljke na izazovnije zadatke manipulacije i inspirišemo razvoj sličnih robotskih sistema,“ rekla je Iu She, koautor rada.
Nova hvataljka predstavlja korak ka jednostavnijim, ali efikasnim rešenjima u robotskoj manipulaciji, sa potencijalom za značajne koristi u različitim industrijskim i istraživačkim primenama.


