Da bi pouzdano pomogli ljudima u svakodnevnim zadacima u širokom spektru okruženja u stvarnom svetu, roboti bi trebalo da budu u stanju da efikasno i spretno manipulišu različitim vrstama objekata. Razvoj novih isplativih robotskih hvatača ili drugih veštačkih sistema sličnih ruci igra ključnu ulogu u omogućavanju spretne manipulacije objektima kod robota.
Istraživači iz Improbable AI Lab i Massachusetts Institute of Technologt (MIT) nedavno su dizajnirali novi robotski hvatač sa dva prsta dizajniran da se efikasnije nosi sa svakodnevnim zadacima manipulacije.
Njihov predloženi robotski sistem, predstavljen u radu na serveru za preprint arXiv i koji će biti uključen u IEEE ICRA 2024 postupak, može uspešno da pokupi objekte različitih oblika i tekstura, a zatim ih postavi na određene lokacije.
„Pružamo mehaničke i dinamičke zahteve za robotski prst koji može da obavlja 30 različitih svakodnevnih zadataka“, napisali su Ruben Kastro Ornelas, Tomas Kantu i njihove kolege u svom radu. „Da bismo ispunili ove zahteve, predstavljamo dizajn prstiju zasnovan na serijsko-elastičnom pokretanju koji nazivamo svakodnevnim prstom. Naš fokus je da učinimo prste što je moguće kompaktnijim dok postižemo željene performanse.“
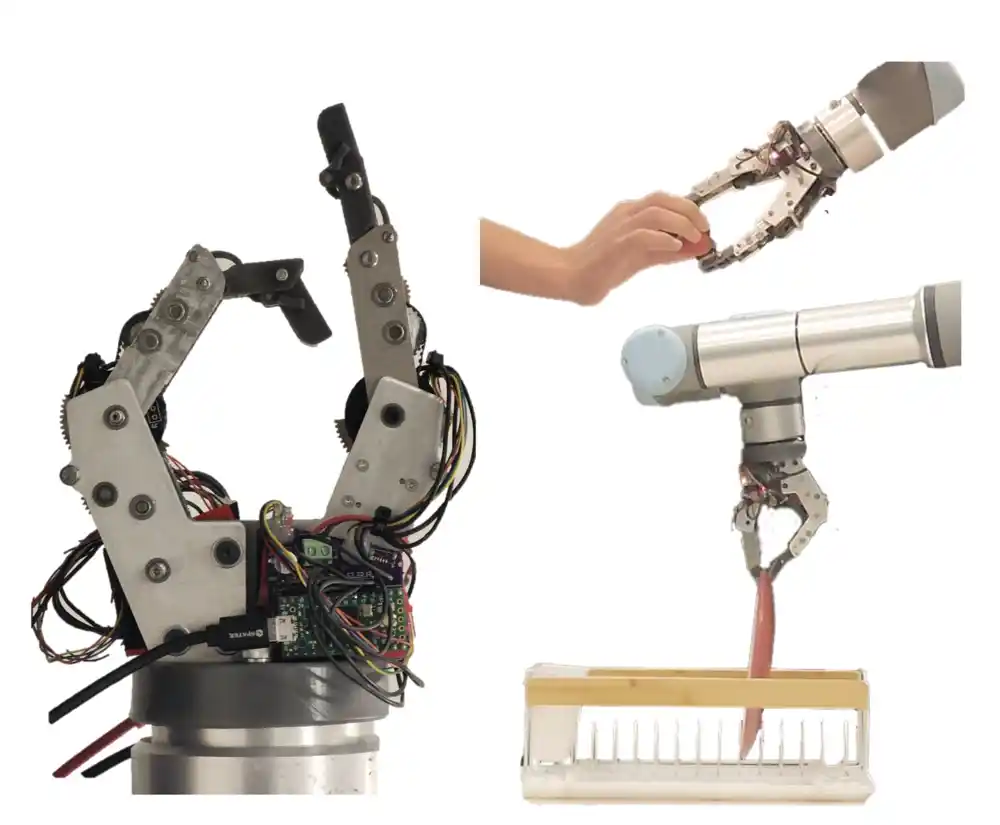
Robotska hvataljka koju su dizajnirali istraživači sastoji se od strukture sa dva robotska prsta koja vire iz nje. Ova dva prsta liče na ljudske prste i po veličini i po obliku, što im omogućava da se savijaju i čvrsto hvataju predmete.
Prsti tima nalik ljudima dizajnirani su za rešavanje jednostavnih svakodnevnih zadataka, kao što je podizanje predmeta i njihovo postavljanje na tačno definisanu lokaciju, za razliku od složenijih i naprednijih ručnih zadataka. Dok je tim u početku kreirao hvataljku sa 2 stepena slobode (DoF) koristeći samo dva svoja robotska prsta, u budućnosti se nadaju da će kreirati hvataljke sa više prstiju.
„Naš prst ima samo 2 DOF“, napisali su istraživači. „Sa 3. DOF-om, veličina dlana bi se povećala. Bilo bi teško staviti pet prstiju na ruku u budućoj iteraciji, ali ruka sa tri, a možda i četiri prsta je i dalje moguća. Da se napravi punih pet prstiju – prstom, možda ćemo morati da sačekamo da bude dostupno više aktuatora sa gustoćom obrtnog momenta“
Da bi procenili performanse svog hvatača sa dva prsta, testirali su ga u nizu eksperimenata u stvarnom svetu. Ovi eksperimenti su procenjivali brzinu i usklađenost njihovog sistema, kao i silu koju je primenio na objekte dok su izvršavali tri osnovna zadatka „izaberi i postavi“.
„Ocenjivali smo svakodnevne prste tako što smo konstruisali robotsku ruku sa dva prsta koja je testirana na različitim parametrima performansi i zadacima kao što su branje i postavljanje posuđa u stalak, branje tankih i ravnih predmeta poput papira i delikatnih predmeta kao što su jagode“, napisao je Ornelas, Kantu. i njihove kolege.
U eksperimentima u stvarnom svetu, istraživački hvatač sa dva prsta pokazao se izuzetno dobro, rešavajući sva tri osnovna zadatka na kojima su ga uspešno testirali. Iako su ovo vrlo osnovni zadaci, oni odražavaju aktivnosti u kojima se ljudi svakodnevno bave.
Obećavajući rezultati prikupljeni u početnim testovima tako naglašavaju obećanje hvatača za razvoj osnovnih kućnih robota. U budućnosti, istraživači bi mogli dodatno da poboljšaju dizajn svog hvatača i procene njegove performanse na širem spektru svakodnevnih zadataka.


