Istraživači u Istituto Italiano di Tecnologia (IIT—Italijanski institut za tehnologiju) nedavno su realizovali novi prototip robotske platforme za svemirske aplikacije. Novi robot, nazvan MARM, ima tri kraka koji se mogu koristiti za hodanje, kretanje, hvatanje i transport modula korisnog tereta dok se samopremešta na svemirskoj infrastrukturi u okruženju mikrogravitacije.
Robot treba da pomogne astronautima u sastavljanju i održavanju infrastrukture dok su u svemiru ili, u budućnosti, na drugim planetama. MARM prototip će biti testiran u fizičkom simulatoru pre razvoja verzije kvalifikovane za svemir. Robot je dizajnirao i proizveo IIT, u saradnji sa Leonardo S.p.A i GMV.
Robotske aplikacije u oblasti istraživanja svemira predstavljaju jedinstvena okruženja, uslove i mogućnosti za razvoj novih platformi. U stvari, dok su tehnologije potrebne za robotsko upravljanje, kretanje i manipulaciju na Zemlji prilično napredne, uslovi orbitalnog okruženja, kao što je mikrogravitacija, predstavljaju nove izazove istraživačkoj zajednici robotike.
Razvoj alata za pomoć astronautima u instaliranju, inspekciji, održavanju i popravci svemirske infrastrukture je cilj projekta MIRROR (Multi-arm Installation Robot for Reading ORUs and Reflectors), gde je rođen novi robot. Stoga su istraživači IIT-a u okviru projekta MIRROR realizovali MARM (Multi-Arm Relocatable Manipulator) platformu, koja je prototip robotskog sistema sposobnog da vrši hvatanje, transport i sklapanje modula, dok se sam kreće po svemirskoj infrastrukturi.
Robot je dizajnirao i proizveo IIT-ova laboratorija za mehatroniku usmerenu na ljude i humanoide, koju koordinira Nikolaos Cagarakis, u saradnji sa Leonardo S.p.A i GMV. MARM robot predstavlja poslednju generaciju robota koju je realizovao tim Nikolaosa Cagarakisa, stoga je njegova istraživačka grupa na IIT-u dizajnirala i proizvela i humanoidnog robota VALK-MAN i robota nalik Kentauru CENTAURO, i radi na modularnom konfigurabilnom kolaborativnom robotu CONCERT .
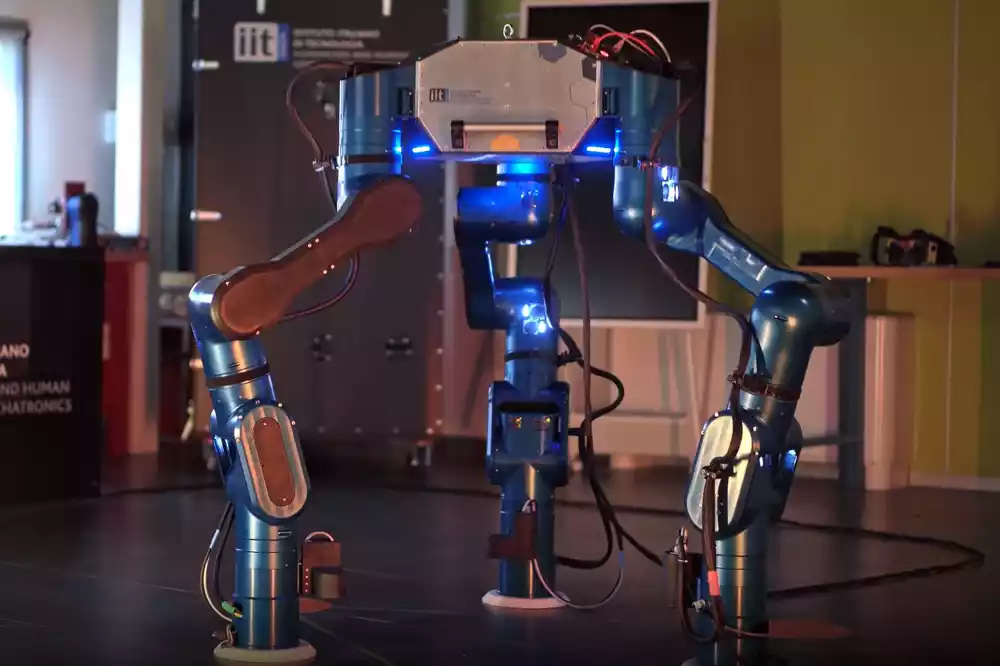
Robotska platforma MARM sastoji se od centralnog tela, tri kraka i priključnog uređaja (korisnog i za napajanje i za slanje/prijem podataka). Izgrađen je prateći pristup računarskog dizajna, koji je razmatrao i optimizovao performanse vezane za mobilnost i fleksibilnost. Ispitivani su kinematika i transportno/operativni kapacitet, kako u prisustvu tako iu odsustvu gravitacije, s obzirom na različite kinematičke modele, koji su se razlikovali po dužini i konformaciji udova, karika i zglobova.
MARM platforma tako može da koristi svoja tri kraka da se kreće okolo, hvatajući standardne interkonekcije na površinama stanice i puzi preko njih, kao i da sklapa i pozicionira komponente (posebno modularne šestougaone pločice, širine 1,2 m i debljine 0,2 m, težine oko 12 kg) i da manipuliše takozvanim orbitalnim rezervnim jedinicama (ORU).
MARM-ova tri uda, koja su povezana sa centralnom bazom karlice, predstavljaju glavnu razliku ovog robota u odnosu na ranije razvijene tehnologije: tri uda daju robotu veću fleksibilnost kretanja i manipulacije i, istovremeno, širi opseg manipulacije, omogućavajući mu da transportuje velike terete i da ih montira i instalira, čak i u dvoručnom režimu.
Pored toga, zahvaljujući rasporedu sa tri kraka, robot je sposoban da izvodi pokrete celog tela, dok jednom u položaju, udovi koji se koriste za sidrenje mogu olakšati operaciju montaže podešavanjem MARM centralne osnove karlice, smanjujući sile koje se prenose na rešetku stanice. . Ovo je jedna od glavnih prednosti posedovanja više udova umesto korišćenja istog udova za puzanje i sklapanje.
Prema predviđenom scenariju, MARM platforma će moći, preko svojih elektromehaničkih i kontrolnih komponenti i zahvaljujući sistemu percepcije i kontinuiranoj razmeni ulaza/izlaza, da preuzme teret iz prodavnice, da se premešta dok ga nosi i sastavite ga na željenu lokaciju.
Prototip MARM platforme će se koristiti za procenu gore navedenog scenarija u rasporedu fizičkog simulatora kako bi se procenila izvodljivost takvog rešenja pre razvoja verzije kvalifikovane za svemir.


