Mali roboti su važni alati za istraživanje i inspekciju, pa, malih prostora. Oni mogu pažljivo da postavljaju svoje korake, omogućavajući im da se kreću oko prepreka, sposobnosti koje veći roboti ne poseduju uvek. Ovo im može omogućiti da pregledaju mašineriju ili pretražuju ruševine u scenarijima katastrofe do kojih drugi roboti ne mogu da dosegnu. Međutim, zbog ograničenja njihove veličine, teško je napraviti male robote koji mogu sami sebe da upravljaju i nose sopstvene izvore energije.
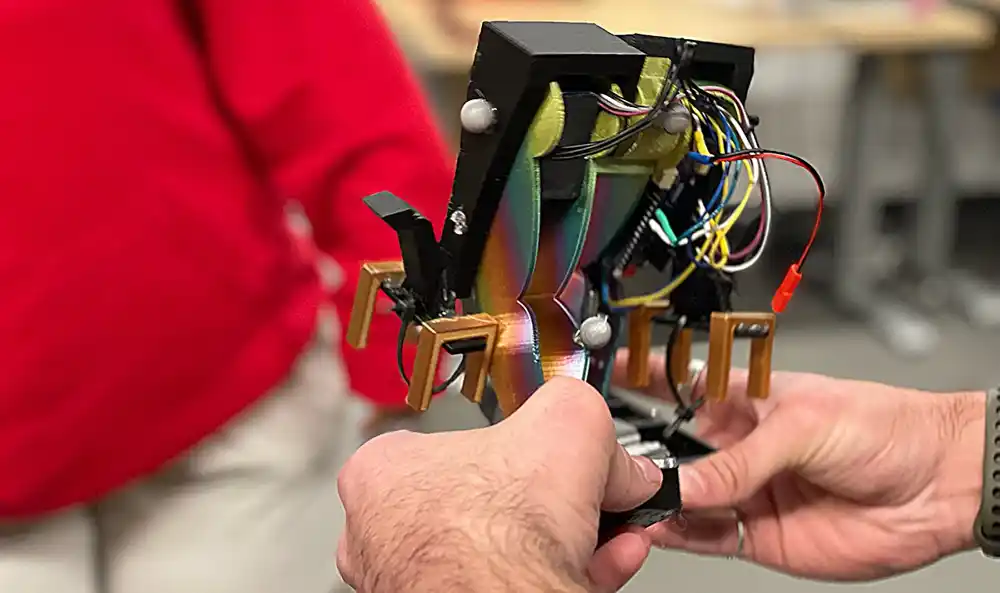
Aaron Johnson, vanredni profesor mašinstva, i Sarah Bergbreiter, profesor mašinstva, i njihov tim istraživača revolucionirali su ovu oblast sa konstrukcijom „Mugatu“, prvog upravljivog dvonožnog robota koji sadrži samo jedan motor. Mugatu je takođe samostalan i samopokretan; otvorena petlja stabilna u svom hodu; i ima kontrolisano levo, desno i pravo upravljanje. Dizajn koristi dva kruta tela i jedan aktuator, jednostavan dizajn hodalice koji je i dalje sposoban za složene pokrete drugih robota.
„Prvi pravac projekta imao je za cilj da pojednostavi način na koji roboti hodaju što je više moguće“, kaže prvi autor Džejms Kajl, nedavno diplomirani i diplomirani inženjer mašinstva. „Jednom kada shvatimo kako skaliranje utiče na kretanje, može biti izuzetno korisno za uzimanje nečega što već postoji i skaliranje nagore ili nadole da bismo uradili stvari kao što su prolaz kroz manje cevi ili nošenje većeg opterećenja.“
Drugi član tima, student mašinskog inženjerstva Kendal Hart, radio je na trenutnom senzoru robota, delu robota koji je omogućio timu da izračuna ukupne troškove transporta, količinu energije koja se koristi na određenoj udaljenosti.
„Pre nego što sam došao u laboratoriju, imao sam nejasno razumevanje MATLAB-a (platforme za programiranje i numeričko računarstvo), ali rad na ovom projektu mi je omogućio da primenim ono što sam naučio u nastavi. Kada smo radili na implementaciji trenutnog senzora, tamo Tamo je bilo dosta otklanjanja grešaka, ali sada me je to učinilo sigurnijim u otklanjanju grešaka bez mojih mentora“, kaže Hart.
Pod nadimkom „Projekat LEGO“, tim ima za cilj da ove šetače na kraju spusti na veličinu LEGO-a. „Biće potrebno neko vreme jer se mehanika svega menja kako počnete da smanjujete veličinu“, kaže Hart. „Ali ono što projekat čini tako posebnim i toliko uticajnim u zajednici je to što nikada ranije nije viđen. Drastično pojednostavljenje ovog uređaja za hodanje u kombinaciji sa njegovim jednim stepenom slobode je obećavajući korak (namera igre reči) ka visoko efikasnim malim robotima.


