Istraživači sa Instituta za vazduhoplovne studije Univerziteta u Torontu (UTIAS) predstavili su par visokotehnoloških alata koji bi mogli da poboljšaju bezbednost i pouzdanost autonomnih vozila poboljšanjem sposobnosti rasuđivanja njihovih robotskih sistema.
Inovacije se bave praćenjem više objekata, procesom koji koriste robotski sistemi za praćenje položaja i kretanja objekata – uključujući vozila, pešake i bicikliste – da planiraju putanju samovozećih automobila u gusto naseljenim područjima.
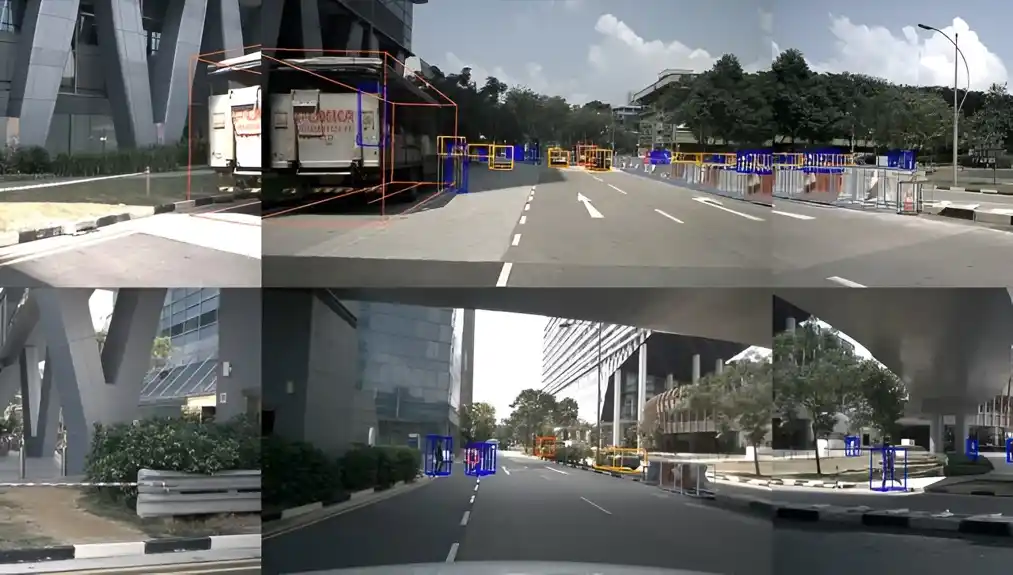
Informacije o praćenju se prikupljaju od senzora kompjuterskog vida (slike 2D kamere i 3D LIDAR skeniranja) i filtriraju se pri svakoj vremenskoj marki, 10 puta u sekundi, da bi se predvidelo buduće kretanje pokretnih objekata.
„Jednom kada se obradi, omogućava robotu da razvije neko razmišljanje o svom okruženju. Na primer, postoji čovek koji prelazi ulicu na raskrsnici, ili biciklista menja trake ispred sebe“, kaže Sandro Papais, dr. student UTIAS-a na Fakultetu primenjenih nauka i inženjerstva. „U svakom vremenskom pečatu, softver robota pokušava da poveže trenutne detekcije sa objektima koje je video u prošlosti, ali može da se vrati samo tako daleko u vreme.
U novom radu predstavljenom na Međunarodnoj konferenciji o robotici i automatizaciji 2024. u Jokohami, Japan, Papais i koautori Robert Ren, student treće godine inženjerskih nauka, i profesor Steven Vaslander, direktor UTIAS-ove laboratorije za robotiku i AI u Torontu, predstavljaju Sliding Vindov Tracker (SVTrack) — metoda optimizacije zasnovana na grafu koja koristi dodatne vremenske informacije da spreči propuštene objekte.
Rad se pojavljuje na serveru za preprint arXiv.
Alat je dizajniran da poboljša performanse metoda praćenja, posebno kada su objekti okludirani sa tačke gledišta robota.
„SVTrack proširuje koliko daleko u prošlost robot uzima u obzir prilikom planiranja“, kaže Papais. „Dakle, umesto da bude ograničen onim što je video samo pre jednog kadra i onim što se dešava sada, može da pogleda u proteklih pet sekundi i onda pokuša da razmisli o svim različitim stvarima koje je video.“
Tim je testirao, obučio i potvrdio svoj algoritam na terenskim podacima dobijenim putem nuScenes, javnog skupa podataka velikih razmera za vozila za autonomnu vožnju koja su radila na putevima u gradovima širom sveta. Podaci uključuju ljudske napomene koje je tim koristio za benchmark performanse SVTrack-a.
Otkrili su da svaki put kada produže vremenski prozor, na najviše pet sekundi, performanse praćenja postaju sve bolje. Ali u proteklih pet sekundi, performanse algoritma su bile usporene zbog vremena izračunavanja.
„Većina algoritama za praćenje bi imala teško razmišljanje o nekim od ovih vremenskih praznina. Ali u našem slučaju, uspeli smo da potvrdimo da možemo da pratimo tokom ovih dužih vremenskih perioda i održavamo doslednije praćenje za dinamičke objekte oko nas“, kaže Papais.
Papais kaže da se raduje izgradnji ideje o poboljšanju memorije robota i njenom proširenju na druge oblasti robotske infrastrukture. „Ovo je samo početak“, kaže on. „Radimo na problemu praćenja, ali i drugim problemima robota, gde možemo da ugradimo više vremenskih informacija da bismo poboljšali percepciju i robotsko razmišljanje.
Drugi rad, čiji su koautori student master studija Chang Von (John) Lee i Vaslander, predstavlja UncertaintiTrack, kolekciju proširenja za 2D metode praćenja po detekciji koje koriste vjerovatnoću detekciju objekata.
„Verovatnoća detekcija objekata kvantifikuje procene nesigurnosti detekcije objekata“, objašnjava Li. „Ovde je ključna stvar da za zadatke koji su kritični za bezbednost želite da znate kada će predviđene detekcije verovatno izazvati greške u nizvodnim zadacima, kao što je praćenje više objekata. Ove greške mogu nastati zbog uslova slabog osvetljenja ili okluzija teških predmeta.
„Procene nesigurnosti nam daju predstavu o tome kada je model u nedoumici, odnosno kada je velika verovatnoća da će dati greške u predviđanjima. Ali postoji ovaj jaz zato što se verovatni detektori objekata trenutno ne koriste u praćenju objekata sa višestrukim praćenjem.“
Lee je radio na radu kao deo svoje dodiplomske teze iz inženjerskih nauka. Sada je student master studija u Vaslanderovoj laboratoriji, on istražuje otkrivanje vizuelnih anomalija za Canadarm3, kanadski doprinos lunarnoj ispostavi Gejtvej koju predvode SAD. „U mom trenutnom istraživanju, cilj nam je da smislimo metodu zasnovanu na dubokom učenju koja detektuje objekte koji lebde u svemiru i predstavljaju potencijalni rizik za robotsku ruku“, kaže Li.
Vaslander kaže da se napredak opisan u dva dokumenta zasniva na radu na koji se njegova laboratorija fokusira već nekoliko godina.
„[Laboratorija za robotiku i veštačku inteligenciju u Torontu] radi na proceni nesigurnosti percepcije i proširenju vremenskog rezonovanja za robotiku već nekoliko godina, jer su one ključne prepreke za širenje širenja robota u otvorenom svetu“, kaže Vaslander.
„Očajnički su nam potrebne metode veštačke inteligencije koje mogu da razumeju postojanost objekata tokom vremena, i one koje su svesne sopstvenih ograničenja i koje će stati i razmišljati kada im se nešto novo ili neočekivano pojavi na putu. To je ono što naše istraživanje ima za cilj.“


