Istraživači sa Univerziteta u Kvinslendu razvili su metod 3D štampanja za proizvodnju robota od tečnog metala koji menja oblik sa mišićno-koštanim kvalitetima inspirisanim fiziologijom životinja.
Dr Ruirui Kiao i njen istraživački tim na Australijskom institutu za bioinženjering i nanotehnologiju (AIBN) koristili su ovu tehniku da naprave komponente i uređaje za medicinsku rehabilitaciju vrhunske snage i fleksibilnosti. Istraživanje je objavljeno časopisu Napredni materijali.
„Nameravali smo da oponašamo kretanje, fleksibilnost i kontrolu kretanja sisara“, rekao je dr Ćao.
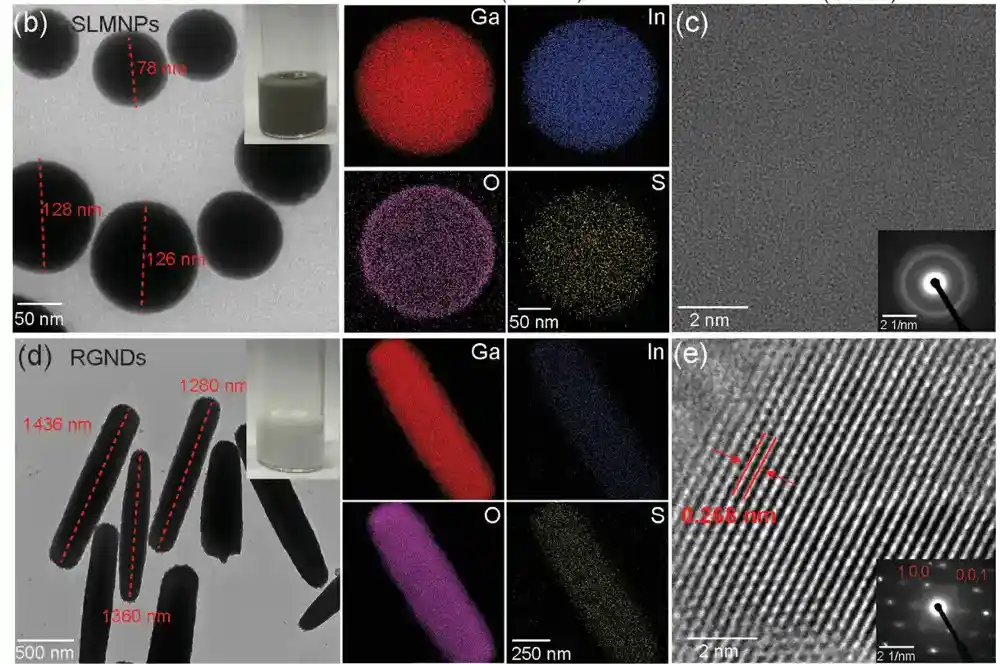
„Kombinovanjem ‘mekih’ sferičnih tečnih metalnih nanočestica i ‘čvrstih’ nanošipka na bazi galijuma u procesu 3D štampanja, uspeli smo da repliciramo međusobno povezanu mrežu kostiju i mišića koja životinjama daje prednost u efikasnosti i snazi.
„Ovaj podesivi galijum-polimer kompozit se može koristiti za sledeću generaciju proizvoda za medicinsku rehabilitaciju kao što su hvataljke visoke preciznosti za protetske udove.
Slično kao u prethodnom radu dr Kiao-a sa tečnim metalom, nove kreacije su sposobne da poprime i zadrže različite oblike i funkcije kada su izložene stimulansima kao što su toplota i infracrveno svetlo.
Dr Kiao je rekao da mnogi proizvođači crpe inspiraciju iz mehanizama kretanja stvorenja mekog tela u prirodi.
„Ali izrada hibridnih struktura je veoma izazovna zbog ograničenja u izboru materijala, kao i zbog složenih procesa u više koraka koji su uključeni u tradicionalne metode proizvodnje“, rekla je ona.
„Razvili smo novu metodu da oponašamo fiziologiju životinja u korist sopstvene tehnologije koristeći brz i jednostavan proizvodni proces.
Dr Kiao je rekao da imajući u vidu lakoću izrade i njegove potencijalne primene, kompozit od mekog krutog polimera bi mogao da revolucioniše polje hibridnih mekih materijala i ubrza inovacije u mekoj robotici.
„Želeli bismo da vidimo istraživanje koje unapređuje tehnologije 3D štampanja i strategije dizajna, fokusirajući se na povećanje udela nanočestica na bazi metala unutar 3D štampanog kompozita“, rekla je ona.
„Ovo će dodatno poboljšati svojstva odziva i na kraju poboljšati performanse hibridnih mekih robota.“


