Obično ne razmišljamo o tome dok to radimo, ali hodanje je komplikovan zadatak. Pod kontrolom našeg nervnog sistema, naše kosti, zglobovi, mišići, tetive, ligamenti i druga vezivna tkiva (tj. mišićno-skeletni sistem) moraju da se kreću u koordinaciji i da reaguju na neočekivane promene ili poremećaje različitim brzinama na veoma efikasan način. Repliciranje ovoga u robotskim tehnologijama nije mali podvig.
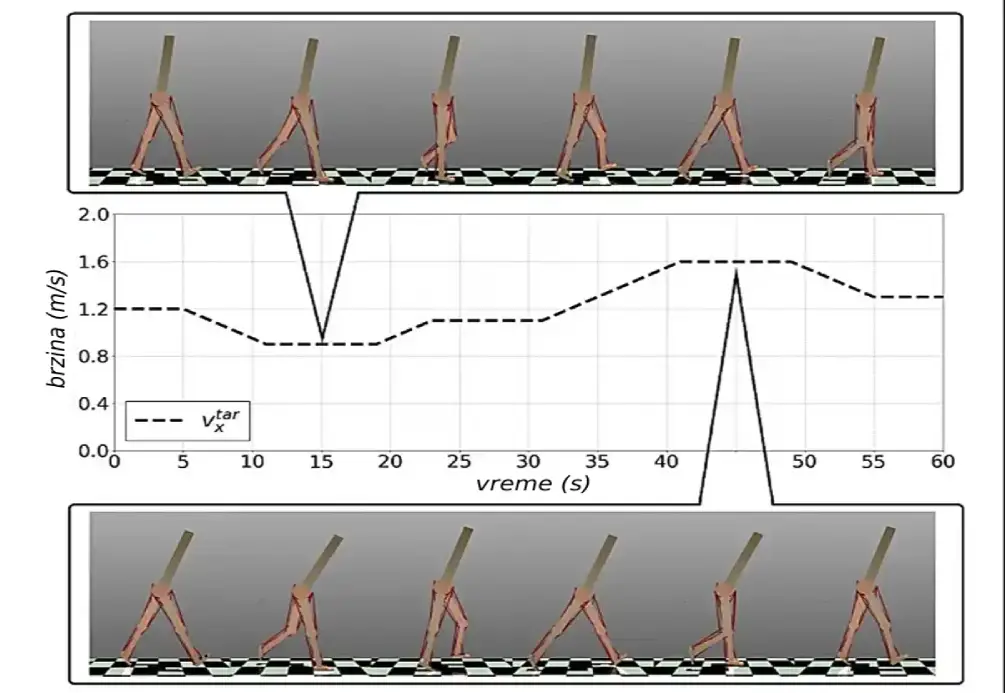
Sada je istraživačka grupa sa Fakulteta inženjerskih nauka Univerziteta Tohoku ponovila hodanje promenljive brzine nalik čoveku koristeći mišićno-skeletni model – kojim se upravlja metodom refleksne kontrole koja odražava ljudski nervni sistem. Ovaj proboj u biomehanici i robotici postavlja nova merila u razumevanju ljudskog pokreta i otvara put inovativnim robotskim tehnologijama.
Detalji njihove studije objavljeni su u časopisu PLoS Computational Biology.
„Naša studija se pozabavila složenim izazovom repliciranja efikasnog hodanja pri različitim brzinama – kamen temeljac mehanizma ljudskog hodanja“, ističe vanredni profesor Dai Ovaki i koautor studije zajedno sa Šunsukeom Kosekijem i profesorom Micuhiro Hajašibeom. „Ovi uvidi su ključni u pomeranju granica za razumevanje ljudske lokomocije, adaptacije i efikasnosti.“
Postignuće je postignuto zahvaljujući inovativnom algoritmu. Algoritam je evoluirao izvan konvencionalne metode najmanjih kvadrata i pomogao je u osmišljavanju modela neuronskog kola optimizovanog za energetsku efikasnost pri različitim brzinama hodanja.
Intenzivna analiza ovih neuronskih kola, posebno onih koji kontrolišu mišiće u fazi zamaha nogu, otkrila je kritične elemente strategija hodanja koje štede energiju. Ova otkrića poboljšavaju naše razumevanje složenih mehanizama neuronske mreže koji podupiru ljudski hod i njegovu efikasnost.
Ovaki naglašava da će znanje otkriveno u studiji pomoći u postavljanju temelja za budući tehnološki napredak.
„Uspešna emulacija hodanja promenljive brzine u muskuloskeletnom modelu, u kombinaciji sa sofisticiranim neuronskim sklopovima, označava ključni napredak u spajanju neuronauke, biomehanike i robotike. To će revolucionisati dizajn i razvoj dvonožnih robota visokih performansi, naprednih protetskih udova i egzoskeleti na najsavremeniji pogon.“
Takav razvoj mogao bi da unapredi rešenja za mobilnost osoba sa invaliditetom i unapredi robotske tehnologije koje se koriste u svakodnevnom životu.
Gledajući unapred, Ovaki i njegov tim se nadaju da će dalje usavršiti okvir kontrole refleksa kako bi ponovo kreirali širi spektar ljudskih brzina i pokreta. Oni takođe planiraju da primene uvide i algoritme iz studije kako bi stvorili prilagodljivije i energetski efikasnije protetike, odela sa električnim pogonom i dvonožne robote. Ovo uključuje integraciju identifikovanih neuronskih kola u ove aplikacije kako bi se poboljšala njihova funkcionalnost i prirodnost kretanja.


