Može li robot koji oponaša guštera koji se penje i hoda da pruži novi uvid u evoluciju i prednosti različitih pokreta kod ljudi i drugih životinja?
Odgovor je da, prema novoj međunarodnoj, interdisciplinarnoj studiji objavljenoj u npj Robotics, čiji je koautor dr Kristofer Klemente sa Univerziteta Sunshine Coast.
„Ova otkrića nam takođe mogu pomoći da napravimo brže i efikasnije robote sa nogama“, rekao je dr Klemente, koji je specijalizovan za biomehaniku živih i izumrlih životinja.
„Ovo bi jednog dana moglo biti važno za penjanje preko prepreka kako bi se pronašli preživeli tokom misija potrage i spasavanja.“
„Naš istraživački tim je razvio robota inspirisanog gušterima sposobnog za trčanje i penjanje i kombinovao je biologiju, robotiku i matematiku zasnovanu na kretanju guštera da bi razumeo da li je bolje da se kreće nogama ili kičmi“, rekao je dr Klemente.
„Otkrili smo da ako želite da se krećete brzo, trebalo bi uglavnom da koristite noge, a da pomerate kičmu što je manje moguće. Ali malo korišćenje kičme pomaže da se koristi manje energije.
„Takođe smo identifikovali da su pokretni udovi ili kičma previše skloni smanjenju stabilnosti tokom penjanja, što znači da je veća verovatnoća da će roboti pasti sa zida.“
Glavni autor, dr Robert Rokenfeler sa Univerziteta u Koblencu, rekao je da su generalno otkrili da je za optimalnu lokomociju potrebno kretanje i kičme i udova, što se usko slagalo sa obrascima kretanja među gušterima.
„Nalazi omogućavaju da se detaljno razjasni stepen evolucionih kompromisa između tri ključna kriterijuma performansi — brzine, efikasnosti i stabilnosti — i odredi relativnu snagu ovih pritisaka selekcije na kretanje“, rekao je dr Rokenfeler.
Dr Klemente je rekao da su među kičmenjacima obrasci kretanja značajno varirali, od bočnih pokreta riba i daždevnjaka do pokreta sisara i ptica pretežno zasnovanih na udovima.
„Međutim, gušteri koriste i svoje udove i kičme, što ih čini savršenom vrstom za proučavanje kako bi popunili praznine u razumevanju zašto su se ove promene možda dogodile“, rekao je on.
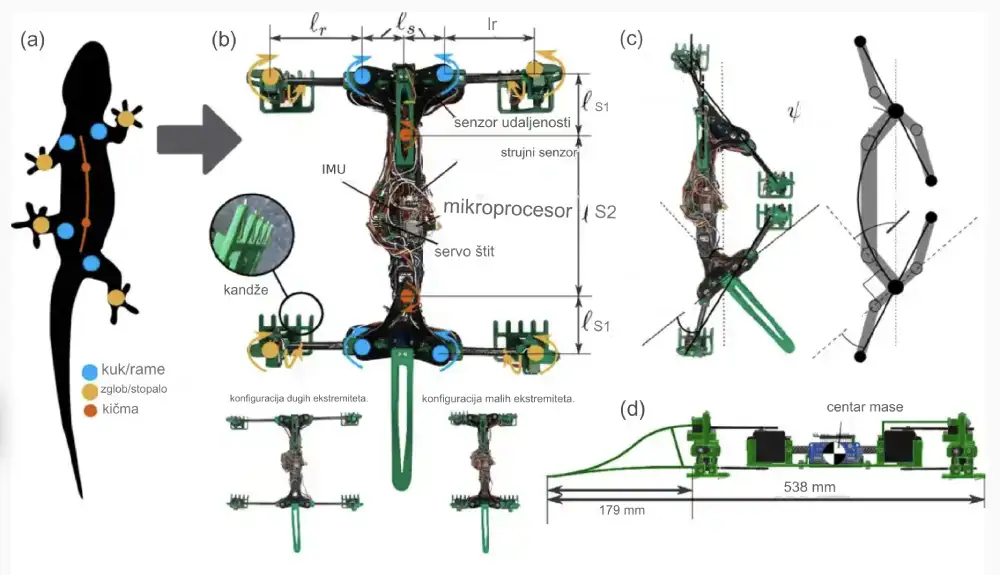
Robot istraživačkog tima inspirisan gušterima bio je sposoban da trči ravno i da se penje po nagnutim ili vertikalnim površinama, sa promenljivom dužinom nogu i sposobnošću da prilagodi opseg pokreta i brzinu koraka kičme i ekstremiteta.
„Takođe smo izgradili pejzaž performansi kako bismo procenili njegovu efikasnost i stabilnost u penjanju“, rekao je dr Klemente.
„Ovi podaci su mapirani sa nalazima iz teorijskog dvodimenzionalnog modela kretanja guštera, kao i merenjima više od 40 vrsta guštera koji se penju i trče.
„Uspeli smo da odredimo nekoliko inženjerskih kriterijuma koje treba uzeti u obzir prilikom razvoja robotskih uređaja sa udovima sposobnih da pređu kroz širok spektar okruženja.
„Lateralno talasanje kičme ne mora biti važno razmatranje ako je maksimiziranje robotske brzine primarni cilj, ali može biti važno za smanjenje potrošnje energije.“
Slično, ovo razumevanje takođe može pomoći u dizajniranju bržih, stabilnijih i efikasnijih robotskih koraka.


