Poslednjih godina, robotičari su razvili sve sofisticiranije robotske sisteme dizajnirane da oponašaju i strukturu i funkciju ljudskog tela. Ovaj rad uključuje robotske ruke, hvataljke koje omogućavaju robotima da hvataju predmete i manipulišu njima kao što ljudi rade dok obavljaju svakodnevne zadatke.
U idealnom slučaju, robotske ruke treba da budu u stanju da izvode veoma precizne pokrete, a da budu relativno pristupačne i lake za izradu. Međutim, većina bioinspirisanih skeletnih struktura za robotske ruke koje su do sada predstavljene imaju veoma zamršene dizajne koji sadrže brojne napredne komponente, što ih čini teškim za proizvodnju u velikim razmerama.
Istraživači sa Masačusetskog instituta za tehnologiju (MIT) nedavno su kreirali novu visoko preciznu robotsku ruku koju bi moglo biti lakše nadograditi, jer se njene komponente mogu izraditi korišćenjem uobičajeno korišćenih tehnika, kao što su 3D štampanje i lasersko sečenje. Njihova robotska ruka, predstavljena u radu objavljenom u časopisu 2023 IEEE International Conference on Soft Robotics (RoboSoft), zasnovana je na takozvanoj modularnoj strukturi, što znači da se sastoji od više blokova koji se mogu preurediti da bi se postigla različita kretanja.
„Dok su paralelne hvataljke i robotske ruke sa više prstiju dobro razvijene i obično se koriste u strukturiranim okruženjima, ostaje izazov u robotici dizajnirati visoko artikulisanu robotsku ruku koja može biti uporediva sa ljudskim rukama za rukovanje raznim svakodnevnim zadacima manipulacije i hvatanja“, Čao Liu, Andrea Monkada i njihove kolege su napisali u svom listu.
„Spretnost obično zahteva više pokretača, ali takođe vodi ka sofisticiranijem dizajnu mehanizama i skuplji je za proizvodnju i održavanje. Meki materijali su u stanju da obezbede usklađenost i sigurnost kada su u interakciji sa fizičkim svetom, ali ih je teško modelirati.“
Primarni cilj nedavnog rada Liua, Moncade i njihovih saradnika bio je stvaranje fleksibilne robotske ruke koja ne zahteva posebno sofisticirane i skupe komponente. Ova fleksibilna ruka bi, međutim, i dalje trebalo da bude u stanju da izvodi naprednije pokrete od robotskih hvataljki koje su zasnovane isključivo na krutim materijalima, što na kraju unapređuje veštine robota manipulacije objektima.
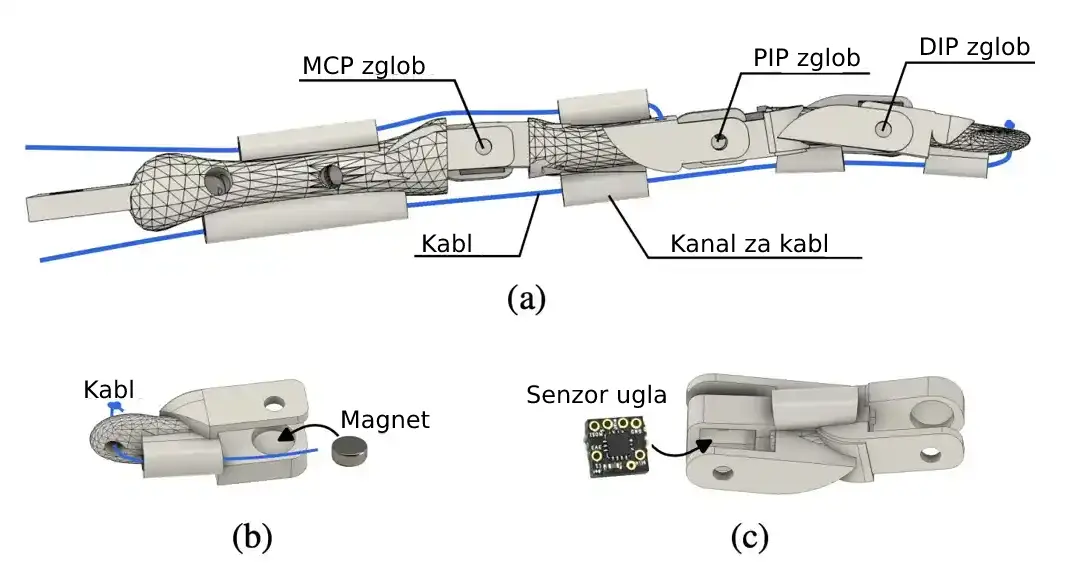
„Ovaj rad predstavlja hibridnu bio-inspirisanu robotsku ruku koja kombinuje meke materije i krute elemente“, napisali su Liu, Moncada i njihove kolege. „Sensing je integrisan u kruta tela što rezultira jednostavnim načinom za procenu poze sa visokom osetljivošću.“
Modularna robotska ruka koju je kreirao istraživački tim na MIT-u može se lako prilagoditi tako da najbolje odgovara različitim aplikacijama. Na primer, istraživači mogu da izaberu da dodaju ili uklone prste i drugačije rasporede njegove komponente kako bi postigli različite tipove hvatanja ili poboljšali njegove performanse u određenim scenarijima.
„Predložena ruka je u modularnoj strukturi koja omogućava brzu izradu i programiranje“, napisali su istraživači. „Proces proizvodnje je pažljivo osmišljen tako da se puna ruka može napraviti od jeftinih materijala i sastaviti na efikasan način.
Zanimljivo je da se i krute i meke komponente koje se koriste za stvaranje nove robotske ruke lako proizvesti. ‘Kosti’ koje čine skelet ruke mogu se 3D štampati, dok su magneti, senzori i kablovi koji se nalaze u njemu lako dostupni na tržištu.
Da bi napravio kožu koja ide oko kostiju, tim je koristio jednostavan proces oblikovanja u dva koraka. Prvo su kreirali različite delove kalupa koristeći 3D štampanje, a zatim su koristili ove delove za oblikovanje silikona u obliku prstiju.
U okviru svoje studije, Liu, Monada i njihove kolege kreirali su prototip svoje ruke sa pet prstiju i ocenili njen učinak. Otkrili su da ruka može uspešno da izvodi različite vrste hvatanja, replicirajući način na koji ljudske ruke hvataju i drže različite predmete. Njihova robotska ruka bila je u stanju da čvrsto uhvati različite fleksibilne i krute predmete različitih veličina, uključujući plastičnu čašu, olovku i okrugli plastični prsten.
Robotska ruka bi uskoro mogla biti razvijena i dalje testirana, kako bi se poboljšale i potvrdile njene sposobnosti. Na kraju, mogao bi se integrisati sa drugim robotskim udovima kako bi se stvorili skalabilni humanoidni roboti koji su bolji u manipulaciji objektima.
„Budući rad uključuje dizajn dlana sa dodatnom rotacijom DoF za palac, kompaktan dizajn ručnog zgloba za držanje elektronike i razvoj kontrolne strategije za spretnu manipulaciju i hvatanje“, zaključuju istraživači u svom radu.


