
Kada deca slome kost, tradicionalni proces umetanja metalnih implantata, samo da bi se uklonili kada kost zaraste, može biti težak, stresan, pa čak i štetan za njihova tela koja još uvek rastu. Biomedicinski inženjer UCF dr Mehdi Razavi veruje da postoji bolji način za lečenje oštećenja kostiju.
Kategorija: Nauka
U Avganistanu siromaštvo i nedostatak obrazovanja povezani sa demencijom
Siromaštvo je usko povezano sa višim stopama demencije među starijim odraslim osobama u Avganistanu, prema novo objavljenoj studiji u eClinicalMedicine Jean-Francois Tranija, vanrednog profesora u Brovn School.

MRI može otkriti endolimfatički hidrops kod Menierove bolesti
Za pacijente sa unilateralnom Menierovom bolešću (MD), magnetna rezonanca (MRI) unutrašnjeg uva nakon intratimpanijskog gadolinijuma (Gd) je korisna za otkrivanje endolimfatičnog hidropsa (ELH), prema studiji objavljenoj na mreži 13. marta u Frontiers in Neuroscience.
Regulacija gvožđa nudi novu nadu u lečenju neizlečivog raka krvi
Značajno otkriće koje povezuje regulaciju gvožđa sa retkim rakom krvi dovelo je do kliničkih ispitivanja potencijalnog novog tretmana za pacijente sa neizlečivom bolešću.
3D modeliranje srca nudi neinvazivnu dijagnozu i opcije lečenja aortne stenoze
3D štampanje složenih anatomskih struktura postalo je sve sofisticiranije u skladu sa napretkom u tehnologiji snimanja, uz upotrebu štampanih fantoma koji olakšavaju detaljniju manipulaciju simulirane anatomije ventila i kontrolu ponašanja protoka krvi.
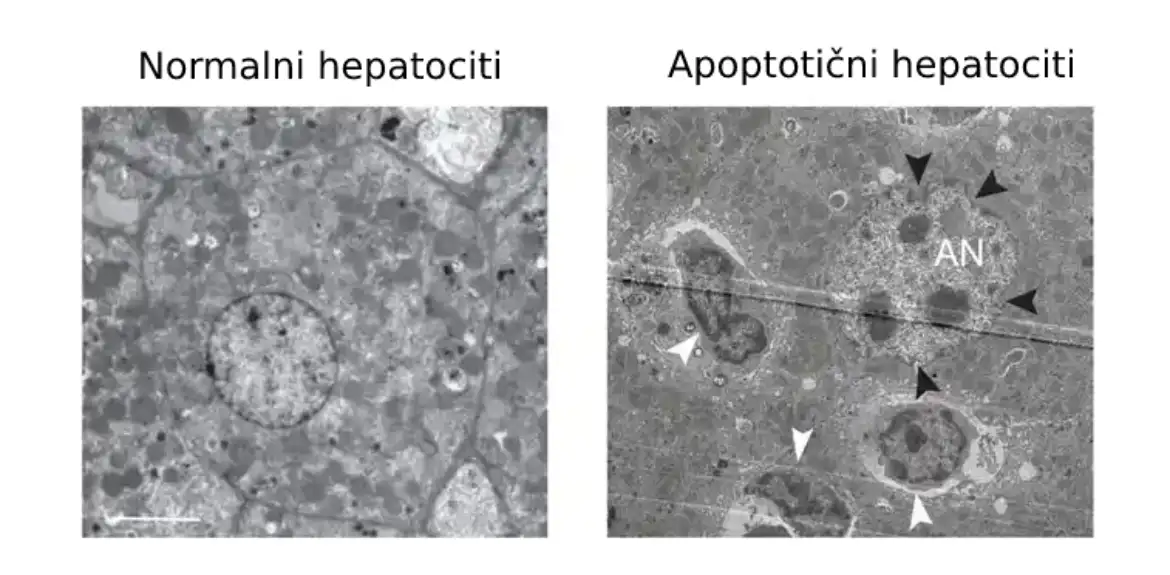
Bela krvna zrnca igraju neočekivanu ulogu u čišćenju mrtvih ćelija jetre
Vrsta belih krvnih zrnaca koja se obično povezuje sa imunim odgovorima na strane čestice može imati drugu ulogu u čišćenju ćelija jetre koje su prošle apoptozu – gde su ćelije programirane da umru na kontrolisan način.
Ljudi sa niskim primanjima imaju povećan rizik od smrti od srčanog udara
Uprkos znatno različitim sistemima zdravstvene zaštite, pacijenti sa niskim primanjima u šest različitih zemalja imaju stopu smrtnosti za 10 do 20 procenata veću od svojih vršnjaka sa visokim prihodima, prema novoj studiji koju su vodili istraživači sa Harvardske medicinske škole, Medicinskog ogranka Univerziteta u Teksasu, Galveston, ICES (bivši Institut za kliničke evaluacione nauke) i drugi međunarodni saradnici.
Serotonin omogućava prenos vizuelnih informacija od očiju do talamusa
Poznato je da ljudi doživljavaju okruženje oko sebe drugačije na osnovu situacije u kojoj se nalaze i sopstvenih osećanja i senzacija. Unutrašnja stanja, kao što su strah, uzbuđenje ili glad, tako mogu uticati na načine na koje se senzorne informacije obrađuju i registruju u mozgu.

Studija pronalazi vezu između česte prehlade i rizika od demencije
Često oboljevanje može uticati na to koliko brzo mozak stari i povećati rizik od demencije ili drugih oblika kognitivnog pada.

Zagrevanje Arktika privlači morske predatore na sever
Morski predatori su proširili svoje domete u arktičke vode u poslednjih 20 godina, vođeni klimatskim promenama i povezanim povećanjem produktivnosti.
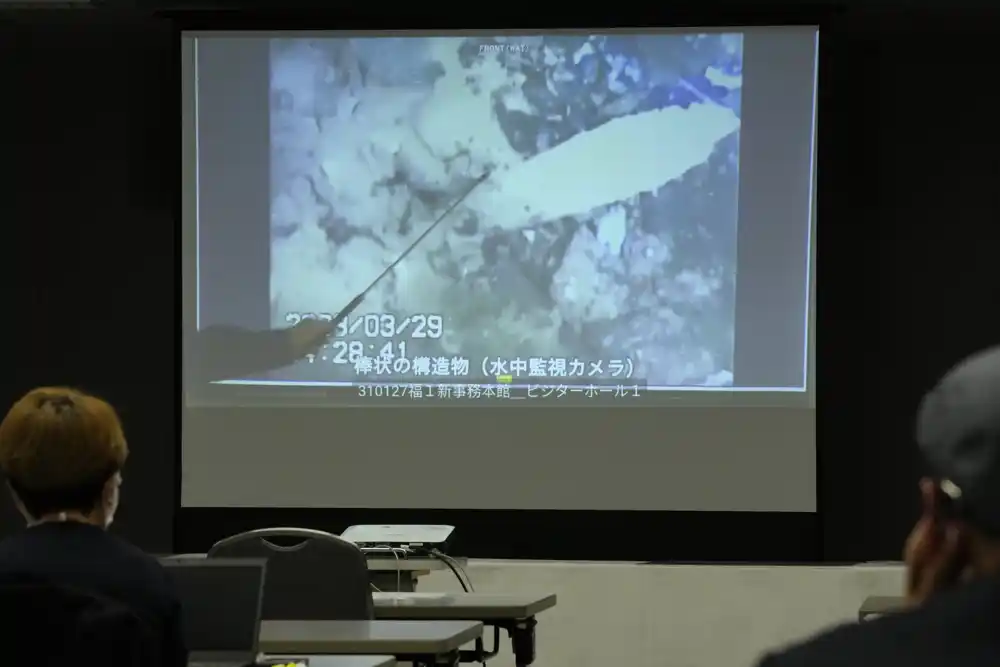
Nove slike iz unutrašnjosti reaktora Fukušima izazivaju zabrinutost za bezbednost
Slike koje je snimila robotska sonda unutar jednog od tri istopljena reaktora u japanskoj nuklearnoj elektrani Fukušima, pokazuju da su otkrivene čelične šipke u glavnoj nosećoj konstrukciji i da nedostaju delovi njenog debelog spoljnog betonskog zida, što je izazvalo zabrinutost za njegovu otpornost na zemljotres u slučaju drugog velikog katastrofa.

Naučnici otkrivaju mehanizme iza neravnomernog zagrevanja Indijskog okeana
Studija objavljena u Nature Communications od strane međunarodnog tima klimatskih naučnika otkriva fizičke mehanizme koji mogu izazvati neujednačeno buduće zagrevanje u Indijskom okeanu i odgovarajuće promene u monsunskim padavinama.

PANDORA test bi mogao da otvori put za bolje otkrivanje oralnog raka
Naučnici iz Sarija razvili su test dokaza o konceptu pod nazivom PANDORA za koji se pokazalo da je preko 92% tačan u identifikaciji pacijenata sa oralnim karcinomom skvamoznih ćelija (OSCC). Takođe se pokazalo da je test više od 80% tačan u identifikaciji pacijenata sa pre-kancerom ili oralnom epitelnom displazijom (OED).
Snažan ultralagani materijal može pomoći skladištenju energije
2D materijali dobijaju svoju snagu od svoje strukture poput lima tanke kao atom. Međutim, slaganje više slojeva 2D materijala će mu uništiti kvalitete koji ga čine tako korisnim.

Arktičkim fokama prete klimatske promene
Saimska prstenasta foka nije jedina vrsta foka koja pati od globalnog zagrevanja, jer se stanište foka koje žive na Arktiku smanjuje dok govorimo, rekao je Brendan P. Kelli, morski ekolog koji se fokusira na okruženje morskog leda, u svom predavanju o Arktiku istraživanje pečata.
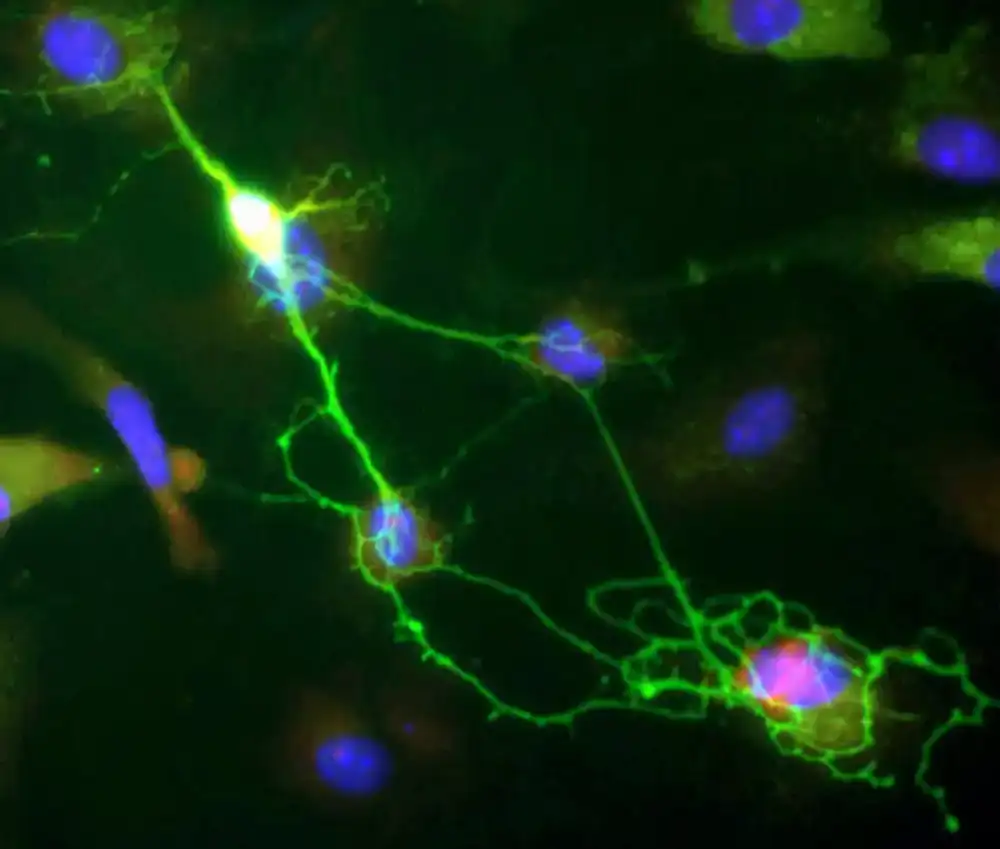
Najnoviji Voltron senzor pojačava detekciju manjih signala moždanih ćelija
Najnovija verzija alata nazvanog po robotu iz crtanog filma iz 1980-ih sada može otkriti male fluktuacije u signalima koji prolaze kroz neurone, omogućavajući bolji uvid u to kako moždane ćelije komuniciraju. Novi Voltron2, koji su razvili Schreiter Lab i projektni tim GENIE iz istraživačkog kampusa Janelia Medicinskog instituta Hauard Hjuz, detaljno je opisan u novom radu u časopisu Neuron.
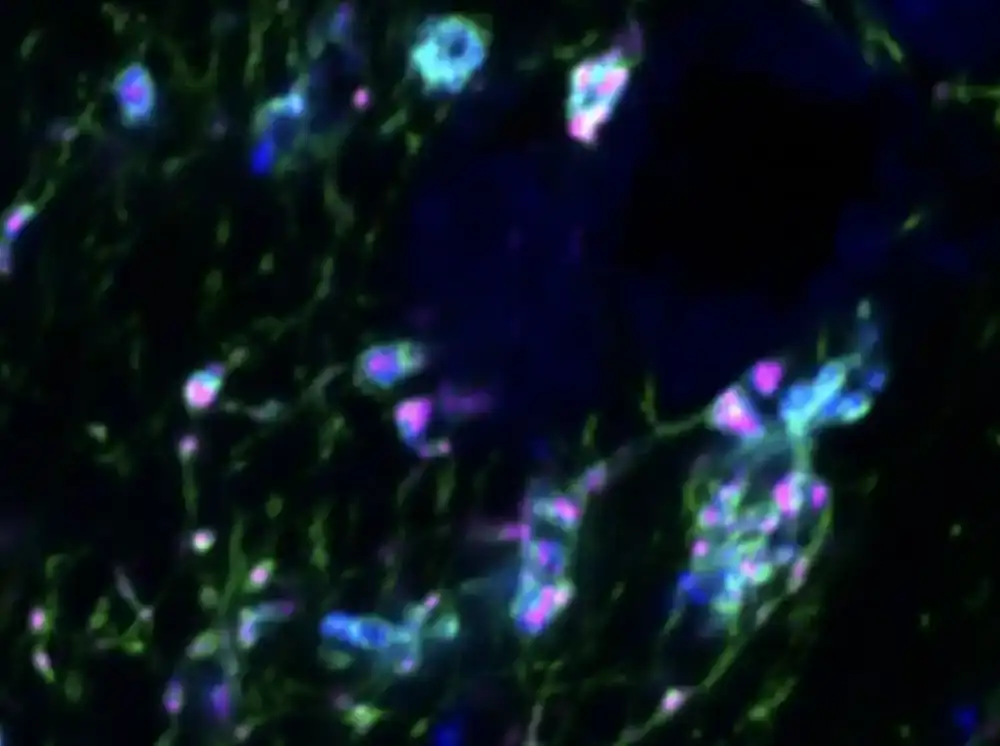
Mali proteini u srcu igraju veliku ulogu
Otkucaji srca su pažljivo koordinisani niz električnih signala koje vode natrijum jonski kanali, koji govore srcu kada da se kontrahuje i opusti. Svaki poremećaj ovih signala može dovesti do srčanih bolesti kao što su nepravilan rad srca ili aritmija. Dva istraživača sa Vašingtonskog univerziteta u Sent Luisu pobliže su pogledala ovaj proces na molekularnom nivou i otkrila šta može da pruži novi uvid u različita srčana stanja i kako da se razviju bolje terapije.
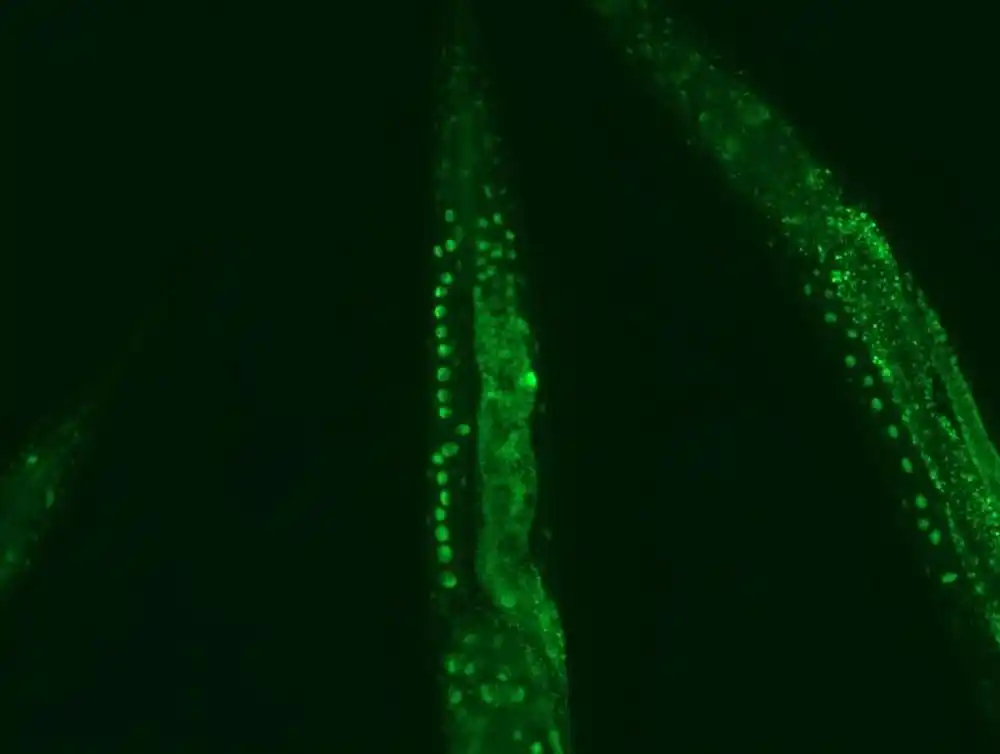
Hladnoća je korisna za zdravo starenje
Hladnoća aktivira mehanizam čišćenja ćelija koji razbija štetne proteinske agregacije odgovorne za različite bolesti povezane sa starenjem. Poslednjih godina, studije na različitim modelnim organizmima već su pokazale da se očekivani životni vek značajno povećava kada se telesna temperatura snizi. Međutim, kako to tačno funkcioniše, još uvek je nejasno u mnogim oblastima. Istraživački tim na CECAD klasteru izvrsnosti u istraživanju starenja Univerziteta u Kelnu sada je otključao jedan odgovoran mehanizam. Studija se pojavljuje u Nature Aging.
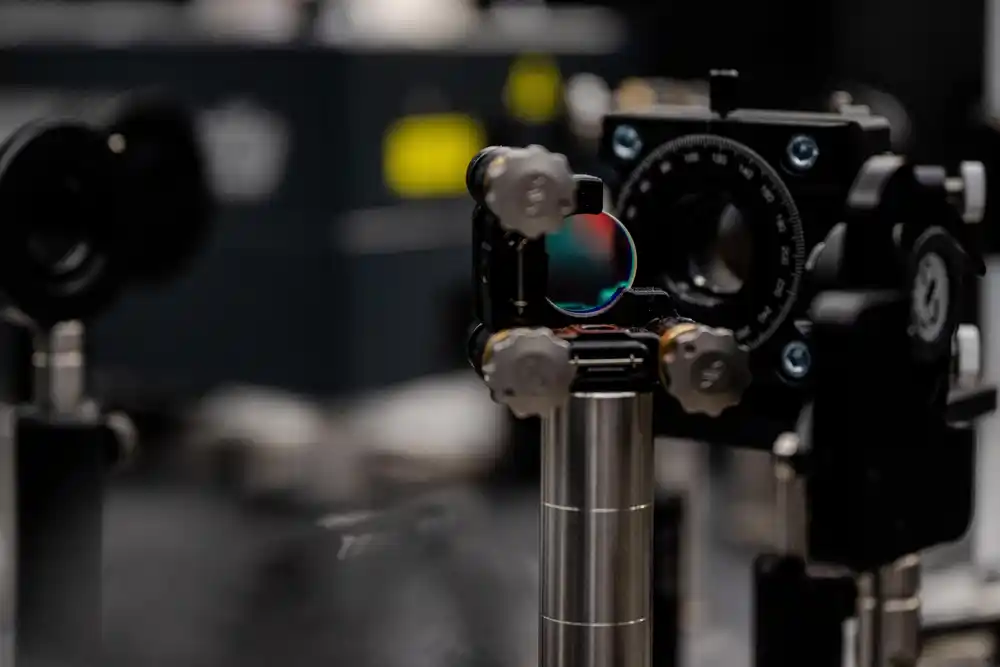
Posmatranje šta se dešava u prvoj pikosekundi kada se proton odvoji od boje nakon izlaganja svetlosti
U određenim molekulima, takozvanim fotokiselinama, proton se može osloboditi lokalno ekscitacijom svetlošću. Postoji iznenadna promena pH vrednosti u rastvoru — neka vrsta brzog prekidača koji je važan za mnoge hemijske i biološke procese. Do sada je, međutim, još uvek bilo nejasno šta se dešava u trenutku oslobađanja protona. To je upravo ono što su istraživači u Cluster of Ekcellence Ruhr Ekplores Solvation RESOLV na Univerzitetu Ruhr Bochum, Nemačka, sada mogli da posmatraju u eksperimentu koristeći novu tehnologiju.
Lečenje testosteronom može pružiti olakšanje ženama koje prolaze kroz menopauzu
Menopauza je nešto kroz šta prolazi skoro svaka žena, ali se o tome retko govori. Većina jednostavno prihvata simptome koji menjaju život kao što su talasi vrućine, umor, magla u mozgu i slab seksualni nagon kao životna činjenica. Ali stručnjaci kažu da postoji jednostavan tretman za simptome menopauze koji je siguran i efikasan, ali se drastično nedovoljno koristi. U stvari, nova nacionalna anketa koju je naručio Orlando Health i koju je sproveo The Harris Poll otkriva da većina Amerikanaca čak i ne zna da postoji kao opcija za poboljšanje simptoma zbog menopauze za žene.