Kada roboti naiđu na nepoznate objekte, bore se da objasne jednostavnu istinu: izgled nije sve. Oni mogu pokušati da zgrabe blok, samo da bi otkrili da je to bukvalno parče kolača. Pogrešan izgled tog objekta mogao bi da navede robota da pogrešno izračuna fizička svojstva kao što su težina objekta i centar mase, koristeći pogrešan hvat i primenjujući više sile nego što je potrebno.
Da bi videli kroz ovu iluziju, istraživači iz Laboratorije za računarske nauke i veštačku inteligenciju (CSAIL) MIT-a dizajnirali su Neuralni proces Grasping, prediktivni fizički model koji je sposoban da zaključi ove skrivene osobine u realnom vremenu za inteligentnije robotsko hvatanje. Na osnovu ograničenih podataka o interakciji, njihov sistem dubokog učenja može pomoći robotima u domenima kao što su skladišta i domaćinstva uz delić računskih troškova u odnosu na prethodne algoritamske i statističke modele.
Neuralni proces hvatanja je obučen da zaključi nevidljiva fizička svojstva iz istorije pokušaja hvatanja i koristi zaključene osobine da pogodi koja će hvatanja dobro funkcionisati u budućnosti. Prethodni modeli su često identifikovali robotske hvate samo iz vizuelnih podataka.
Tipično, metode koje zaključuju fizička svojstva se zasnivaju na tradicionalnim statističkim metodama koje zahtevaju mnogo poznatih shvatanja i veliku količinu vremena za računanje da bi dobro funkcionisale. Neuralni proces hvatanja omogućava ovim mašinama da efikasnije izvršavaju dobra hvatanja koristeći daleko manje podataka o interakciji i završavaju svoje izračunavanje za manje od desetinke sekunde, za razliku od sekundi (ili minuta) koje zahtevaju tradicionalne metode.
Istraživači primećuju da Neuralni proces hvatanja uspeva u nestrukturiranim okruženjima kao što su kuće i skladišta, pošto oba sadrže mnoštvo nepredvidivih objekata. Na primer, robot pokretan MIT modelom mogao bi brzo da nauči kako da rukuje čvrsto upakovanim kutijama sa različitim količinama hrane bez da vidi unutrašnjost kutije, a zatim ih postavi tamo gde je potrebno. U centru za ispunjenje, objekti sa različitim fizičkim svojstvima i geometrijama bi bili smešteni u odgovarajuću kutiju da bi bili isporučeni kupcima.
Obučen na 1.000 jedinstvenih geometrija i 5.000 objekata, Grasping Neural Process je postigao stabilno hvatanje u simulaciji za nove 3D objekte generisane u ShapeNet repozitorijumu. Zatim je grupa predvođena CSAIL-om testirala svoj model u fizičkom svetu preko dva ponderisana bloka, gde je njihov rad nadmašio osnovnu liniju koja je razmatrala samo geometriju objekata.
Ograničena na 10 eksperimentalnih hvatanja unapred, robotska ruka je uspešno pokupila kutije u 18 i 19 od 20 pokušaja po komadu, dok je mašina dala samo osam i 15 stabilnih hvatanja kada nije bila spremna.
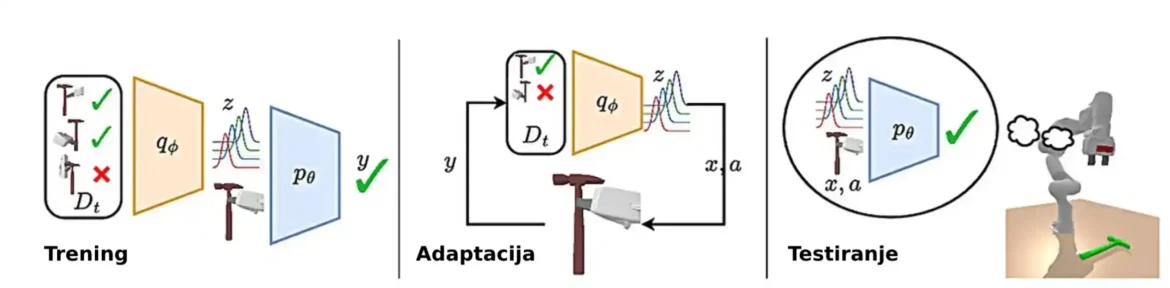
Iako su manje teatralni od glumca, roboti koji završavaju zadatke zaključivanja takođe imaju trodelni čin koji treba da prate: obuku, adaptaciju i testiranje. Tokom koraka obuke, roboti vežbaju na fiksnom skupu objekata i uče kako da zaključuju fizička svojstva iz istorije uspešnih (ili neuspešnih) hvatanja.
Novi CSAIL model amortizuje zaključivanje fizike objekata, što znači da obučava neuronsku mrežu da nauči da predvidi izlaz inače skupog statističkog algoritma. Potreban je samo jedan prolaz kroz neuronsku mrežu sa ograničenim podacima o interakciji da bi se simuliralo i predvidelo koje zahvate najbolje funkcionišu na različitim objektima.
Zatim se robot upoznaje sa nepoznatim objektom tokom faze adaptacije. Tokom ovog koraka, Neuralni proces hvatanja pomaže robotu da eksperimentiše i ažurira njegovu poziciju u skladu sa tim, razumevajući koji hvatovi bi najbolje funkcionisali. Ova faza popravljanja priprema mašinu za poslednji korak: testiranje, gde robot formalno izvršava zadatak na predmetu sa novim razumevanjem njegovih svojstava.
„Kao inženjer, nije mudro pretpostaviti da robot zna sve neophodne informacije koje su mu potrebne da bi uspešno shvatio“, kaže glavni autor Michael Nosevorthi, doktor nauka na MIT-u. student elektrotehnike i računarstva (EECS) i CSAIL filijala.
„Bez ljudi koji označavaju svojstva objekta, roboti su tradicionalno morali da koriste skup proces zaključivanja.“
Prema rečima kolege glavnog autora, EECS Ph.D. studenta i CSAIL podružnice Seiji Shav, njihov Neuralni proces Grasping Neural Process mogao bi biti pojednostavljena alternativa: „Naš model pomaže robotima da to urade mnogo efikasnije, omogućavajući robotu da zamisli koji će hvati dati najbolji rezultat.“
„Da bi roboti izašli iz kontrolisanih prostora kao što su laboratorija ili skladište u stvarni svet, oni moraju biti bolji u suočavanju sa nepoznatim i manje je verovatno da će propasti i pri najmanjoj varijaciji u njihovom programiranju. Ovaj rad je kritičan korak ka realizaciji puni transformativni potencijal robotike“, kaže Chad Kessens, istraživač autonomne robotike u DEVCOM Vojnoj istraživačkoj laboratoriji američke vojske, koja je sponzorirala rad.
Dok njihov model može pomoći robotu da efikasno zaključi skrivena statička svojstva, istraživači bi želeli da prošire sistem kako bi prilagodili zahvate u realnom vremenu za više zadataka i objekata sa dinamičkim osobinama. Oni zamišljaju da će njihov rad na kraju pomoći u nekoliko zadataka u dugohorizontnom planu, poput sakupljanja šargarepe i seckanja. Štaviše, njihov model bi se mogao prilagoditi promenama u distribuciji mase u manje statičnim objektima, kao kada napunite praznu bocu.
Istraživačima se pridružuje Nikolas Roj, profesor aeronautike i astronautike na MIT-u i član CSAIL-a, koji je stariji autor. Grupa je nedavno predstavila ovaj rad na IEEE međunarodnoj konferenciji o robotici i automatizaciji (ICRA 2024), održanoj u Jokohami, Japan, od 13. do 17. maja.


