Kao napredak u tehnologiji robotike, istraživači sa Šangajskog univerziteta Jiao Tong predstavili su novu origami hvataljku na hibridni pogon, dizajniranu da se uhvati u koštac sa izazovom hvatanja i manipulisanja objektima sa neviđenom svestranošću i preciznošću.
Ovaj inovativni uređaj, naglašen u radu pod naslovom „Hibridna origami hvataljka sa promenljivom krutošću i dužinom prstiju“, u časopisu Kiborg i bionički sistemi, obećava da će preoblikovati mogućnosti robotskih sistema u industrijama u rasponu od proizvodnje do zdravstvene zaštite.
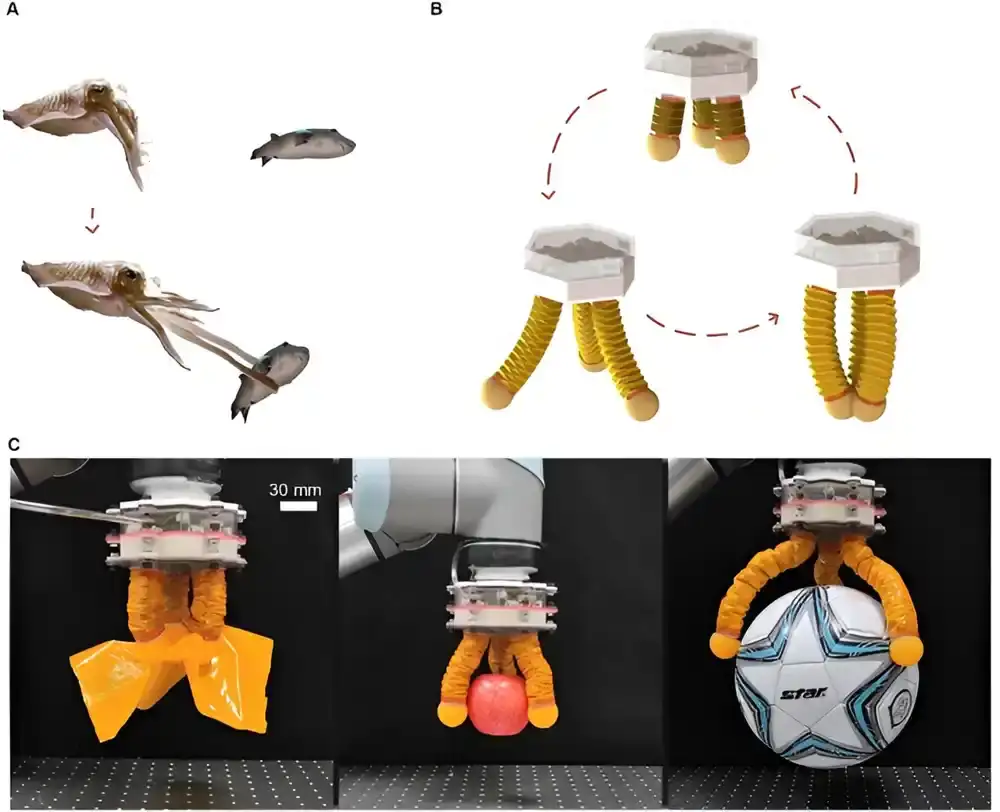
Novorazvijena hvataljka koristi kombinaciju pneumatskih mehanizama i mehanizama na kablove za kontrolu strukture inspirisane origamijem, omogućavajući podesivu krutost prstiju i promenljivu dužinu prstiju. Ovaj sofisticirani dizajn omogućava hvataljku da rukuje širokim spektrom predmeta tako što menja svoje fizičke karakteristike kako bi odgovarao zadatku koji je pri ruci – značajan razvoj u oblasti meke robotike.
Tradicionalne robotske hvataljke, često ograničene svojom krutom konstrukcijom i nedostatkom prilagodljivosti, mogu da se bore sa zadacima koji zahtevaju delikatno rukovanje ili složene manevre. Origami hvataljka, nasuprot tome, crpi inspiraciju iz biološke usklađenosti i mekoće koja se vidi u prirodnim organizmima.
Njegovi prsti, napravljeni od termoplastične tkanine presvučene uretanima i diskretnih tankih metalnih limova, kombinuju fleksibilnost mekih materijala sa preciznošću i čvrstoćom krutih komponenti. Ovo omogućava hvataljku da se blisko prilagodi površinama sa kojima je u interakciji, poboljšavajući njegovu sposobnost da bezbedno uhvati različite materijale bez izazivanja oštećenja.
Jedna od ključnih inovacija origami hvataljke je njegova sposobnost da dinamički podešava dužinu i krutost svojih prstiju. Modifikovanjem dužine kablova i ulaznog pritiska pneumatskog sistema, hvataljka može promeniti svoj zahvat kako bi primila predmete različitih veličina i težina. Ova funkcija je posebno korisna u scenarijima gde se različitim objektima treba rukovati uzastopno ili u okruženjima gde su prostor i prilagodljivost ključni.
Dizajn hvataljke uključuje tri nezavisno kontrolisana kabla za svaki prst, koji mogu ili sinhrono povući za ravnomerno kretanje ili diferencijalno za složeno, višesmerno kretanje. Ovaj nivo kontrole je od suštinskog značaja za zadatke koji zahtevaju fine mogućnosti manipulacije, kao što je sklapanje delikatnih komponenti ili navigacija kroz pretrpane ili neravne površine.
Istraživački tim je sproveo opsežna testiranja kako bi pokazao funkcionalnost hvataljke. Eksperimenti su pokazali da hvataljka može efikasno da prilagodi svoju silu hvatanja i konfiguraciju prsta za rukovanje predmetima u rasponu od tankih komada tkanine do velikih, teških fudbalskih lopti.
Ova svestranost je podržana inovativnim hibridnim sistemom pneumatskih kablova hvatača, koji obezbeđuje i snagu potrebnu za rukovanje većim opterećenjima i nežan dodir potreban za lomljivije predmete.
Gledajući unapred, istraživači planiraju da dodatno usavrše dizajn hvataljke kako bi poboljšali njegove sposobnosti nosivosti i povećali njegovu energetsku efikasnost. Takva poboljšanja bi mogla da prošire primenu hvatača, čineći ga vrednim alatom za industrije u kojima su ručna spretnost i delikatno rukovanje najvažniji, kao što su hirurška podešavanja ili složeno sklapanje potrošačke elektronike.
Ovaj proboj predstavlja značajan korak napred u tekućoj integraciji meke robotike u industrijske i komercijalne aplikacije. Kako tehnologija robotike nastavlja da se razvija, uređaji kao što je origami hvataljka spremni su da igraju ključnu ulogu u omogućavanju efikasnijih, sigurnijih i svestranijih automatizovanih sistema.


