Manje veličine serija umesto masovne proizvodnje, složenije proizvodne linije, sve veći pritisak konkurencije, nestabilni lanci snabdevanja: U tom kontekstu, francusko-nemački istraživački projekat GreenBotAI bavi se robotikom.
U fokusu su tri glavna cilja — obezbeđivanje kontinuiteta proizvodnje čak i u vremenima pandemije, jačanje evropske nezavisnosti u automatizaciji proizvodnje i značajno smanjenje potrošnje energije robotskih aplikacija u evropskim fabrikama.
Tehnički, GreenBotAI se fokusira na vreme reakcije i kašnjenje u industrijskoj robotici, optimizovano planiranje putanje i izvršavanje dobro definisanih zadataka dok je robot u pokretu („u letu“). Bez zaustavljanja, na primer, moguće je snimiti 2D slike za prepoznavanje objekata za željeni zadatak rukovanja ili sklapanja. U ovom francusko-nemačkom istraživačkom projektu, Fraunhofer IVU predvodi konzorcijum.
Projekat se fokusira na agilan pristup rukovanju materijalima i radnim predmetima. Algoritmi veštačke inteligencije bi trebalo da daju veću fleksibilnost proizvodnji i ubrzaju proizvodnju u različitim industrijskim sektorima. Cilj je inteligentna robotika sposobna spontano da se nosi sa složenim zadacima.
Očekuje se da će neophodne komponente u hardveru, najsavremenije metode dubokog učenja za praćenje, poboljšanja obrade podataka i kontrole grešaka, najaviti generacijsku smenu u robotici.
GreenBotAI radi na nekoliko poluga za smanjenje potrošnje energije do 25%. To uključuje AI modele sa smanjenim brojem podataka, ubrzane zadatke hvatanja i smanjenu računarsku snagu.
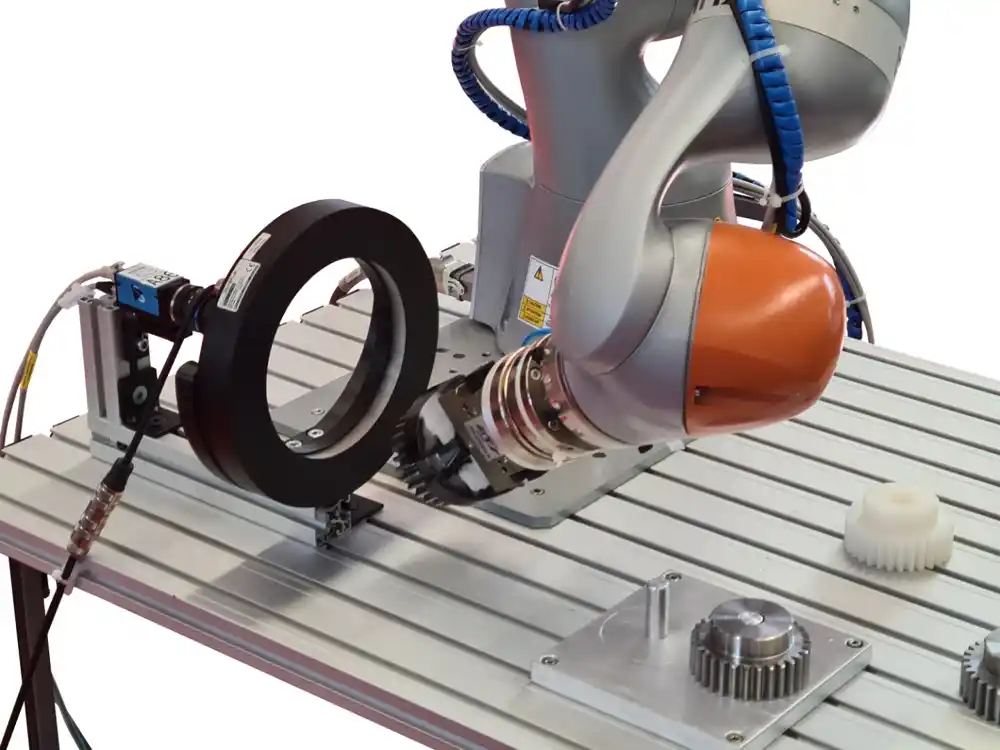
Na sajmu u Hanoveru, održanom od 22. do 26. aprila 2024. godine, projektni partneri će pokazati šta su do sada postigli. Pojedinačna slika snimljena u 2D tehnologijom industrijske kamere („Demonstracija jednim snimkom“) komponente i mala računarska snaga dovoljni su da robot pokupi, pregleda i pozicionira ovu komponentu po želji.
Softver Kseidana, razvijen u Fraunhofer IVU, proverava da li je robot pokupio ispravnu komponentu. Gosti na štandu mogu to sami da isprobaju: postavljaju opremu na bilo koju tačku na sto u radnom prostoru kolaborativnog robota (robot dizajniran za saradnju sa ljudima).
Na osnovu informacija o slici, softver određuje položaje svih objekata u odnosu na robota, izračunava putanju robota i određuje poziciju hvatanja. Robot zatim podiže opremu i pregleda je, u potpunosti se oslanjajući na informacije o slici.
Ovde dolazi u obzir procena podataka o sili u realnom vremenu, vodeći robota kako da uklopi podignutu opremu u drugu brzinu, koristeći pametnu aplikaciju AI koja imitira ljudski dodir. Digitalni blizanac dodatno vizualizuje sve stvarne radnje robota.
Posetioci takođe mogu uživo da dožive montažu i integrisanu aplikaciju za kontrolu kvaliteta.


