Nova tehnologija senzora elektromiografije (EMG) koja omogućava dugoročnu stabilnu kontrolu nosivih robota i na koju ne utiču znoj i mrtva koža korisnika, nedavno je privukla pažnju. Nosivi roboti su uređaji koji se koriste u raznim rehabilitacionim tretmanima za starije osobe i pacijente koji se oporavljaju od moždanog udara ili traume.
Zajednički istraživački tim predvođen profesorom Jae-Voong Jungom sa KAIST škole elektrotehnike (EE) i profesorom Jung Kimom sa KAIST odeljenja za mašinstvo (ME) uspešno je razvio rastezljiv i lepljiv senzor mikroigle koji može električno da oseti fiziološke signale na visokom nivou bez uticaja na stanje kože korisnika.
Rezultati ovog istraživanja, koji su napisali koautori Heesoo Kim i Juhiun Lee, koji su oboje doktori nauka. kandidata u KAIST School of EE, objavljeni su u Science Advances pod naslovom „Lepljivi flasteri bez pripreme kože, rastezljivi mikroigli za pouzdano elektrofiziološko sensing i kontrolu egzoskeleta robota“.
Da bi nosivi roboti prepoznali namere iza ljudskog pokreta za njihovu upotrebu u rehabilitacionom lečenju, potreban im je elektrofiziološki senzor koji se može nositi koji daje precizna EMG merenja. Međutim, postojeći senzori često pokazuju pogoršanje kvaliteta signala tokom vremena i na njih u velikoj meri utiču stanje kože korisnika. Štaviše, veća mehanička tvrdoća senzora uzrokuje buku jer kontaktna površina nije u stanju da prati deformaciju kože. Ovi nedostaci ograničavaju pouzdanu, dugoročnu kontrolu nosivih robota.
Međutim, očekuje se da će nedavno razvijena tehnologija omogućiti dugoročna i visokokvalitetna EMG merenja jer koristi rastezljivu i lepljivu provodnu podlogu integrisanu sa nizovima mikroiglica koje mogu lako da prodru u stratum corneum bez izazivanja nelagodnosti.
Zbog svojih odličnih performansi, očekuje se da će senzor moći stabilno da kontroliše nosive robote tokom dužeg vremenskog perioda, bez obzira na promenu stanja kože korisnika i bez potrebe za pripremnim korakom koji uklanja znoj i mrtve ćelije sa površine njihove kože. .
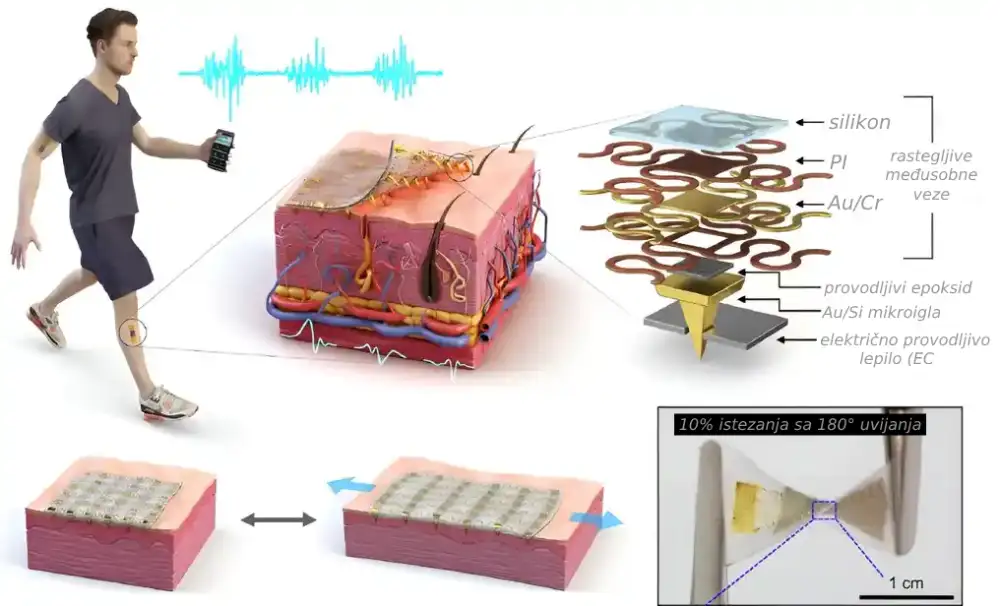
Istraživački tim je napravio rastezljiv i lepljiv senzor mikroiglica integracijom mikroiglica u mekanu silicijum polimernu podlogu. Čvrste mikroigle prodiru kroz stratum corneum, koji ima visoku električnu otpornost.
Senzor može efikasno smanjiti otpor kontakta sa kožom i dobiti visokokvalitetne elektrofiziološke signale bez obzira na kontaminaciju. U isto vreme, mekana i lepljiva provodljiva podloga može da se prilagodi površini kože i rastegne sa pokretom korisnika, obezbeđujući udobno pristajanje i minimizirajući buku izazvanu kretanjem.
Da bi potvrdio upotrebljivost nove zakrpe, istraživački tim je sproveo eksperiment pomoći pri kretanju koristeći robota koji se može nositi. Pričvrstili su flaster mikroigle na nogu korisnika, gde je mogao da oseti električne signale koje generiše mišić. Senzor je zatim poslao otkrivenu nameru robotu koji se može nositi, omogućavajući robotu da pomogne korisniku da lakše podigne teški predmet.
Profesor Jae-Voong Jung, koji je vodio istraživanje, rekao je: „Razvijeni rastezljivi i lepljivi senzor mikroigle može stabilnost detektovati EMG signale bez uticaja na stanje kože korisnika. Kroz ovo ćemo moći da kontrolišemo nosive robote sa višim preciznost i stabilnost, što će pomoći rehabilitaciji pacijenata koji koriste robote“.


