Istraživački tim predvođen profesorom Sang-hoon Lee-om na Odseku za robotiku i mehatroniku Instituta za nauku i tehnologiju Daegu Gieongbuk uspešno je razvio senzor za imperceptivnu površinsku elektromiografiju (sEMG). Senzor je ključan u omogućavanju amputiracima donjih udova da kontrolišu robotske protetske noge kako žele i očekuje se da će u velikoj meri doprineti rehabilitaciji i boljem kvalitetu života.
Sa nedavnim porastom bolesti životnog stila kao što je dijabetes, brzo raste broj dodatnih amputiranih donjih udova. Trajni efekti amputacije donjih ekstremiteta nisu samo fizički invaliditet, već i psihički invaliditet. Da bi se rešio ovaj problem, bionička tehnologija donjih ekstremiteta razvijena je poslednjih godina kako bi se izgubljena noga zamenila robotskom protetikom.
Najvažnija stvar u razvoju robotskih protetskih nogu je da se stabilno implementira funkcija donjih ekstremiteta kako je predviđeno amputiranim, a da bi se to postiglo potrebna je sposobnost brzog i preciznog dobijanja bioloških signala amputiraca. Najpogodniji metod je korišćenje neinvazivnih sEMG senzora; međutim, ove senzore je teško koristiti u praksi.
Senzor mora da se nalazi unutar silikonske obloge utičnice da bi snimao elektromiografske signale. Međutim, silikonska obloga je veoma uska, stvara vlažnu sredinu, a na nju utiče i utičnica koja je podložna snažnim dinamičkim pokretima zbog težine robotske protetske noge. Ovo onemogućava stabilno snimanje bioloških signala mišića tokom dužeg vremenskog perioda bez oštećenja samog senzora.
U tom kontekstu, istraživački tim predvođen profesorom Sang-hoon Lee-om iz DGIST-a razvio je imperceptivni sEMG senzor, biointerfejs formiran kroz mikroelektromehanički sistem. Studija je objavljena u časopisu npj Fleksibilna elektronika.
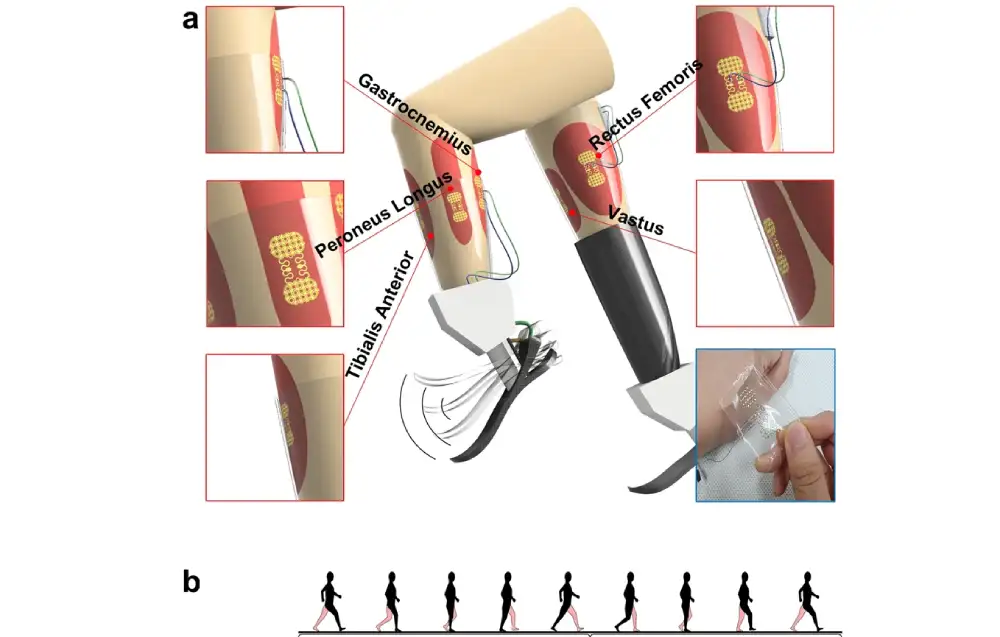
Imperceptivni sEMG senzor koji je razvio istraživački tim oponaša serpentinastu strukturu kako bi pružio fleksibilnost i elastičnost uz postizanje prozračnosti i prianjanja. Dakle, senzor se može primeniti na različite amputirane delove tela i može se koristiti više puta tokom dužeg vremenskog perioda. Štaviše, u kombinaciji sa bežičnim modulom, senzor dobija signale u realnom vremenu koji se generišu kada amputirani hodaju sa robotskim protetskim udovima, utičnicama i silikonskim oblogama.
Da bi potvrdio funkciju senzora, istraživački tim je pričvrstio imperceptivni sEMG senzor na amputirani donji ekstremitet i procenio funkciju senzora tako što je snimao signale mišića amputiranog. Rezultati su pokazali da je senzor uspešno dobijao visokokvalitetne mišićne signale u realnom vremenu amputiranog koji hoda u različitim okruženjima (na ravnom tlu, uzbrdo i dole, i na stepenicama) i prenosio signale bežično kako bi pomogao amputirancu u hodanju, kao što je verifikovano od senzora za analizu pokreta ugrađenog u robotsku protetsku nogu.
Štaviše, analizom mišićnih signala generisanih iz plantarne fleksije i dorsifleksije kod osoba sa amputacijom, istraživački tim je potvrdio da je učinak selektivnog akvizicije signala imperceptivnog sEMG senzora bolji od onih drugih komercijalnih senzora. S tim u vezi, istraživački tim očekuje da će senzor biti primenjen u različitim nosivim tehnologijama, pored precizne kontrole robotskih protetskih nogu i ruku na osnovu bio-signala.
Profesor Li je rekao: „Iako u Koreji i širom sveta ima više amputiranih nego što mislimo, postoje mnoga ograničenja za svakodnevne aktivnosti i život jer protetske noge koje se mogu kontrolisati u skladu sa namerama korisnika nisu dostupne. Na osnovu rezultata ovoga istraživanja, nastavićemo dalje istraživanje i na kraju razviti bioničke udove koji mogu implementirati senzorne i motoričke funkcije, baš kao i ljudske udove, kako bi pomogli amputiranima da uživaju u svim aktivnostima svakodnevnog života.“


