Mali tim mašinskih inženjera na Univerzitetu Carnegie Mellon, u saradnji sa kolegom sa Univerziteta Ilinois Urbana-Champaign, dizajnirao je i napravio ono što opisuju kao najjednostavniji hodajući robot ikada. Napisali su rad koji opisuju ideje koje su koristili za izgradnju robota i faktore koji su doveli do njegove jednostavnosti i postavili su ga na arXiv server za preprint.
Tokom proteklih nekoliko decenija, inženjeri robotike su radili na stvaranju robota koji mogu hodati na dve noge i to glatko kao životinje ili ljudi. Do sada su se takvi napori pokazali plodonosnim, ali krajnji cilj tek treba da se postigne. Roboti i dalje hodaju kao roboti.
Kako je posao napredovao na dizajniranju hodajućih robota, mnogo inženjeringa se razvilo uključujući motore, hidrauliku, čipove za obradu i razne druge delove i delove. Rezultati su obično bili izuzetno komplikovani, sofisticirani i skupi. Zbog toga su se mnogi pitali da li možda ne postoji manje komplikovan način da se stvari urade. U ovom novom naporu, istraživački tim je zauzeo potpuno novi pristup problemu i na taj način je pronašao način da u velikoj meri pojednostavi funkcije potrebne da bi se robotu omogućilo da hoda na dve noge.
Rad tima bio je inspirisan radom kanadskog inženjera Tada MekGira – još u kasnim 1980-im, napravio je jednostavnog robota koji nije imao motore, aktuatore ili kompjutere za kontrolu njegovih pokreta. Umesto toga, uključivao je dizajn koji je omogućio robotu da se lagano spusti niz blago nagnutu ravan. Ovo je omogućeno, primećuju istraživači, pametnom upotrebom ravnoteže i gravitacije u dizajnu.
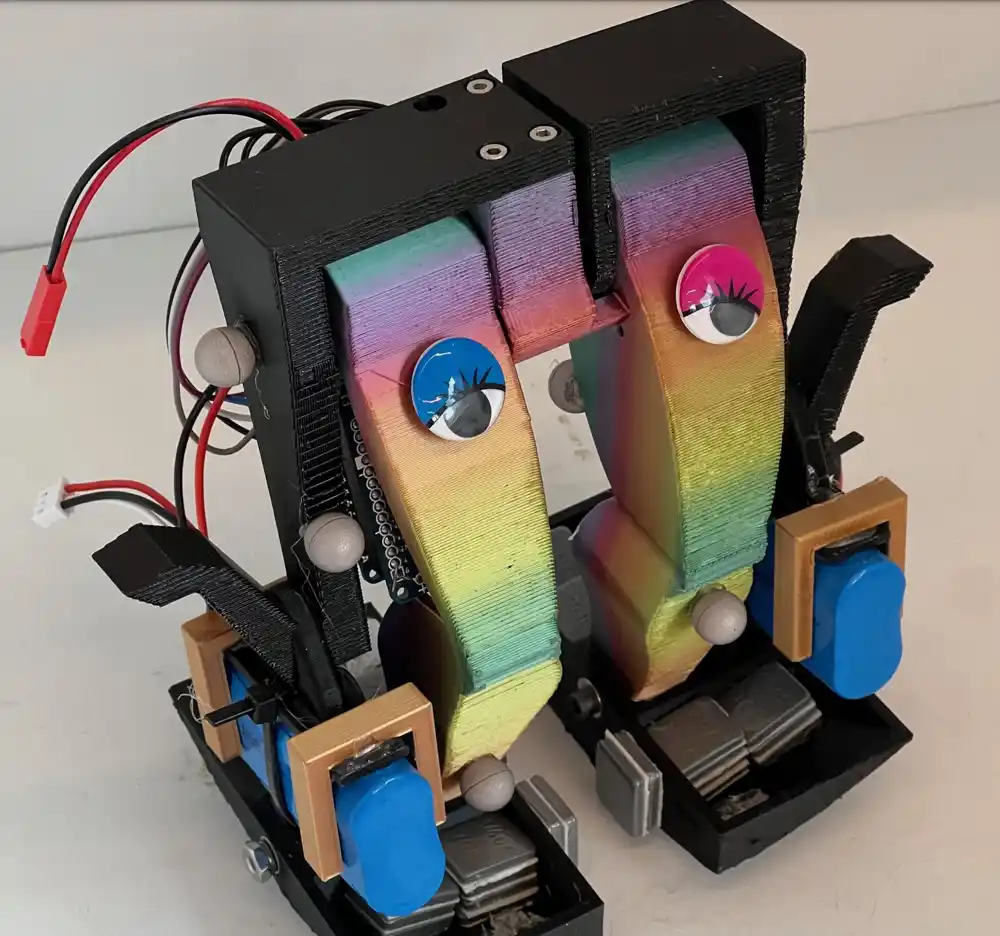
Uzimajući novi pogled na takav pristup, istraživači na ovom novom naporu dizajnirali su sličnog robota koji bi mogao hodati po ravnoj površini, zahvaljujući samo jednom aktuatoru. Njihova ideja je bila da naprave robota napravljenog samo od nogu povezanih zajedno, koji bi mogao da hoda. Rezultat je bio robot kojeg su nazvali Mugatu.
Ima dve noge, spojene zajedno na vrhu. Svaka noga ima stopalo na donjem kraju, ali ne i koleno. Svi njegovi delovi su dizajnirani da iskoriste prednost gravitacije – na primer, stopala su bila oblikovana na takav način da omogućavaju robotu da se kotrlja napred-nazad, ali i da se lagano okreće na jednu ili drugu stranu.
Noge su takođe sastavljene na način koji je obezbedio da centar gravitacije robota uvek bude ispod centra zakrivljenosti za svako stopalo. To je značilo da ako robot izađe iz ravnoteže, uvek će se vratiti u uspravan položaj. Takođe su dodali još jednu osobinu – kada bi stajao sa spojenim stopalima, robot bi se uvek blago naginjao unazad, omogućavajući nozi da se podigne, a da nikada ne udari u zemlju.
Konačni rezultat je robot čiji su svi njegovi delovi izbalansirani zajedno na način koji obezbeđuje da može da hoda bez pada dok koristi samo jedan aktuator kao izvor energije. Takođe se pokazalo da je dizajn veoma efikasan, energetski. Tim zaključuje sugerišući da je njihov dizajn samo prvi korak u stvaranju novog tipa dvonožnog robota — onog koji se više oslanja na dizajn nogu nego na načine da ih pomera.


