Roboti bi mogli biti dragoceni pomoćnici za većinu onih koji prvi reaguju, jer bi im mogli pomoći da daljinski nadgledaju ili intervenišu u područjima koja su nedostupna ili opasna po život za ljude. Vatrogasci, koji su u velikom riziku da se povrede tokom svojih misija, nesumnjivo bi imali koristi od pomoći pouzdanih mobilnih robota.
Istraživači sa Universidad Rei Juan Carlos i Universidad Autonoma de Madrid nedavno su kreirali autonomnog zemaljskog robota koji bi mogao pomoći vatrogascima kada se bave hitnim slučajevima u zatvorenim okruženjima. Njihov sistem, predstavljen u časopisu Journal of Field Robotics, mogao bi omogućiti agentima koji reaguju na vanredne situacije u slučaju požara da bolje planiraju svoje intervencije, otvarajući im bezbedne puteve za pristup pogođenim područjima i podržavajući ih tokom evakuacije.
„Ovaj rad je deo projekta pod nazivom HelpResponder, koji ima za cilj da smanji stope nesreća i vreme misije interventnih timova“, rekla je za Tech Ksplore Noelia Fernandez Talavera, jedan od istraživača koji su sproveli studiju. „Ovo se postiže korišćenjem fiksnih svetionika, dronova i zemaljskih robota. Zemaljski robot je razvijen kao deo BSc projekta i podržava timove za hitne slučajeve dobijanjem parametara životne sredine u realnom vremenu.“
Nedavne studije koje istražuju evoluciju požara u Španiji istakle su potrebu za novim tehnologijama koje bi mogle bolje pomoći vatrogascima. Ovi radovi su prikupili podatke o nesrećama koje su uticale na agente koji su se bavili misijama u zatvorenom okruženju, kao što je urušavanje struktura ili kontrakcija bolesti povezanih sa udisanjem toksičnih gasova.
„Ova statistika otkriva potrebu da vatrogasci poznaju životnu sredinu pre nego što intervenišu“, rekao je Talavera. „Sve informacije o lokaciji požara, prisustvu štetnih gasova i mogućim putevima su relevantne za izvođenje efikasnijih i sigurnijih intervencija.
Robot koji su kreirali Talavera i njene kolege mogu da nadgledaju svoje okruženje, deleći podatke koje prikuplja sa ljudskim agentima. Ovo se postiže korišćenjem različitih senzora koji mogu da mere temperaturu, vlažnost i kvalitet vazduha u zatvorenom prostoru, kao i njegov položaj i položaj drugih objekata. Ovi podaci se zatim čuvaju u bazi podataka kojoj vatrogasci mogu daljinski pristupiti preko aplikacije za pametne telefone.
„Robot ima tri operativna režima za rešavanje različitih scenarija“, objasnio je Talavera. „Ručni režim omogućava operateru da daljinski kontroliše pomoću tastature, džojstika ili džojpada da generiše komande brzine. Operater takođe može da kontroliše robota iz direktnog pogleda ili preko grafičkog korisničkog interfejsa. U ovom poslednjem slučaju, interfejs mora pružaju dovoljno informacija da zadrže svoju situacionu svest, kao što su mapa scene, tačna lokacija robota, slike njegove kamere i tako dalje.“
Drugi režim rada robota, nazvan autonomni režim, omogućava mu da samostalno istražuje unutrašnje okruženje izbegavajući potencijalne prepreke. Da bi se to postiglo, oslanja se na algoritam za planiranje putanje pokrivenosti koji koristi podatke prikupljene od strane integrisanih senzora da locira robota, otkrije i identifikuje prepreke u njegovoj okolini i vodi ga kroz skup tačaka puta.
„Dok je u autonomnom režimu, robot može da pokrije čitave sobe i hodnike, pružajući lokalne informacije o uslovima životne sredine“, rekao je Talavera. „Konačno, režim evakuacije stvara brze i bezbedne rute ka ciljevima. Ovaj režim koristi prethodno poznavanje scene da bi izračunao najkraći put od trenutne pozicije do cilja. Ova pozicija cilja može biti izlaz iz zgrade ili lokacija žrtve, između ostalog“.
Robot istraživača ima modularni dizajn, što znači da mu se druge komponente (npr. termalne kamere ili drugi senzori) mogu dodati bez promene njegove konfiguracije jezgra. Pored toga, robot je mali i zasnovan na pristupačnim komponentama. Ovo mu omogućava da dopre do područja koja su nedostupna ljudskim agensima, a istovremeno olakšava njegovo širenje.
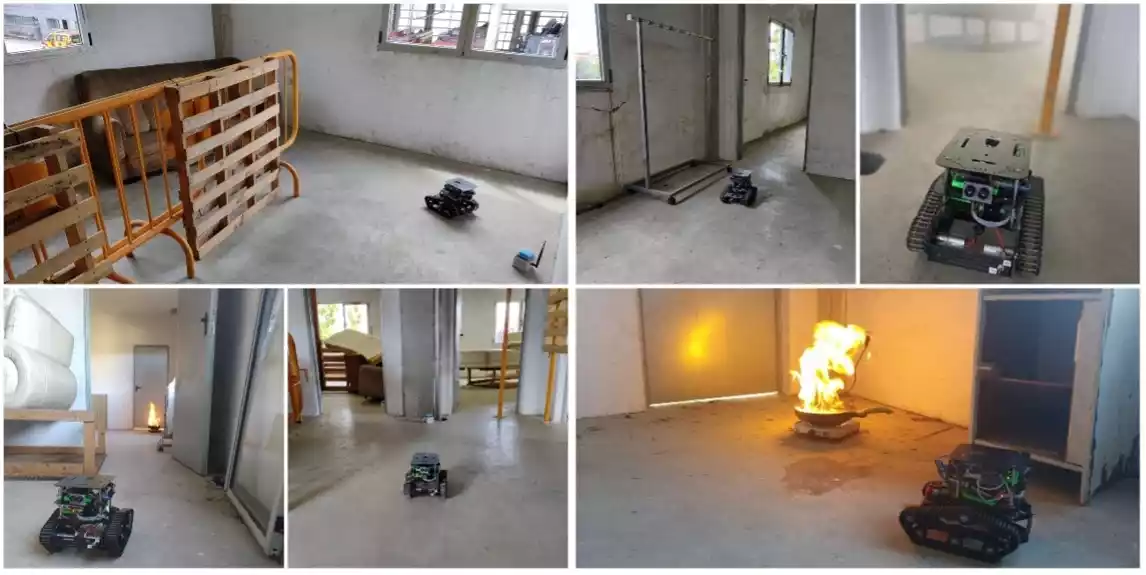
Telavera i njene kolege su testirale svog robota u nizu testova, uključujući i simulacije i testove u stvarnom svetu. Njihovi rezultati su bili veoma obećavajući, jer je robot mogao efikasno da se nosi sa različitim zadacima, dok je autonomno izbegavao prepreke i nudio dragocenu podršku vatrogascima.
U procenama, robot bi mogao da se nosi sa različitim misijama u jednom danu, zahvaljujući svojim robusnim komponentama i dobroj autonomiji baterije. Tim je takođe kreirao simulacije robota koji bi takođe mogli da pomognu vatrogascima da se pripreme za buduće intervencije u zatvorenim prostorima, pomažući im da identifikuju najefikasnije i bezbedne puteve da stignu do željene lokacije ili jednostavno vežbaju korišćenje robota.
„Razvili smo naš sistem u saradnji sa krajnjim korisnicima i potvrdili ga u veoma realističnim scenarijima“, rekao je Talavera. „Pravi testovi su obavljeni u Ujedinjenom bezbednosnom centru u Alkorkonu, u saradnji sa vatrogasnom službom tog grada. Rezultati su pokazali da prototip može da radi u teškim uslovima i da locira vruća i toksična žarišta unutar mape intervencije. Efikasno pokriva scenarije i izbegava prepreke, tako da vatrogasci mogu da donose brze odluke na osnovu dobijenih podataka i generišu strategiju intervencije.“
Robot koji su kreirale Talavera i njene kolege uskoro bi mogao da bude zaposlen i testiran u drugim vatrogasnim službama. Pored toga, moglo bi da inspiriše stvaranje sličnih robotskih sistema dizajniranih da pomognu drugim osobama koje prve reaguju, uključujući policajce ili timove koji završavaju misije potrage i spasavanja.
„Sledeći koraci u našem istraživanju biće poboljšanje autonomnog navigacionog sistema integracijom ROS-a i poboljšanje simulatora za reprodukciju dinamičkih scenarija u kojima vatra i dim napreduju na isti način kao što bi bili u stvarnim situacijama“, dodao je Talavera. „Razvija se i veb platforma koja obuhvata različite tehnologije tako da podaci koje prikupljaju robot, dronovi i farovi mogu biti analizirani istovremeno. Na taj način će sistem postati lakši za korišćenje i vredniji za hitne slučajeve.“


