Kako mobilni roboti postaju napredniji, postaje ih lakše primeniti u širokom spektru podešavanja u stvarnom svetu. Jedan od faktora koji će omogućiti njihovu široku implementaciju je njihova sposobnost da se autonomno kreću unutar različitih tipova okruženja.
Do sada su mnogi mobilni roboti postigli obećavajuće rezultate u navigaciji jednostavnim okruženjima, posebno onima sa glatkim podom ili terenom. U stvarnom svetu, međutim, mnoga okruženja, uključujući industrijska postrojenja, neke puteve i prirodna okruženja, imaju neravne terene, sa rupama ili izbočinama u zemlji, neredom i drugim preprekama.
Istraživači Ruske akademije nauka i Visoke škole ekonomije Nacionalnog istraživačkog univerziteta u Moskvi nedavno su razvili novi navigacioni sistem koji bi mogao da poboljša sposobnost mobilnih robota da se kreću po grubim površinama, istovremeno izbegavajući različite vrste prepreka. Ovaj sistem, predstavljen u radu prethodno objavljenom na arKsiv-u, mogao bi pomoći da se olakša postavljanje robota u složenijim i pretrpanim okruženjima sa neravnim terenima.
„Sigurna navigacija na neravnim terenima je važan problem u robotskim istraživanjima“, napisali su Stepan Dergačev, Kiril Muravjev i Konstantin Jakovljev u svom radu. „Predlažemo 2.5D navigacioni sistem koji se sastoji od izgradnje mape nadmorske visine, planiranja putanje i lokalnog praćenja putanje sa izbegavanjem prepreka. Za praćenje lokalne putanje koristimo metod kontrole integralnog prediktivnog integrala putanje (MPPI).“
Sistem za navigaciju robota koji su predložili Dergačev i njegove kolege zasnovan je na MPPI, algoritmu za optimizaciju i ispravljanje nelinearnih putanja koji su uveli istraživači sa Tehnološkog instituta Džordžije 2016. U svrhu svoje studije, tim je prilagodio ovaj algoritam tako da bi bio pogodan za optimizaciju putanja u sredinama sa neravnim terenima, koristeći 2.5D visinske karte.
„Koristimo kartu lokalne nadmorske visine kao ulaz za MPPI algoritam“, objasnili su Dergačev i njegove kolege u svom radu. „MPPI je vođen vrednostima prohodnosti terena izračunatim ovom visinskom kartom. Ove vrednosti prohodnosti su izračunate na osnovu strmine nagiba, hrapavosti površine i drugih parametara.“
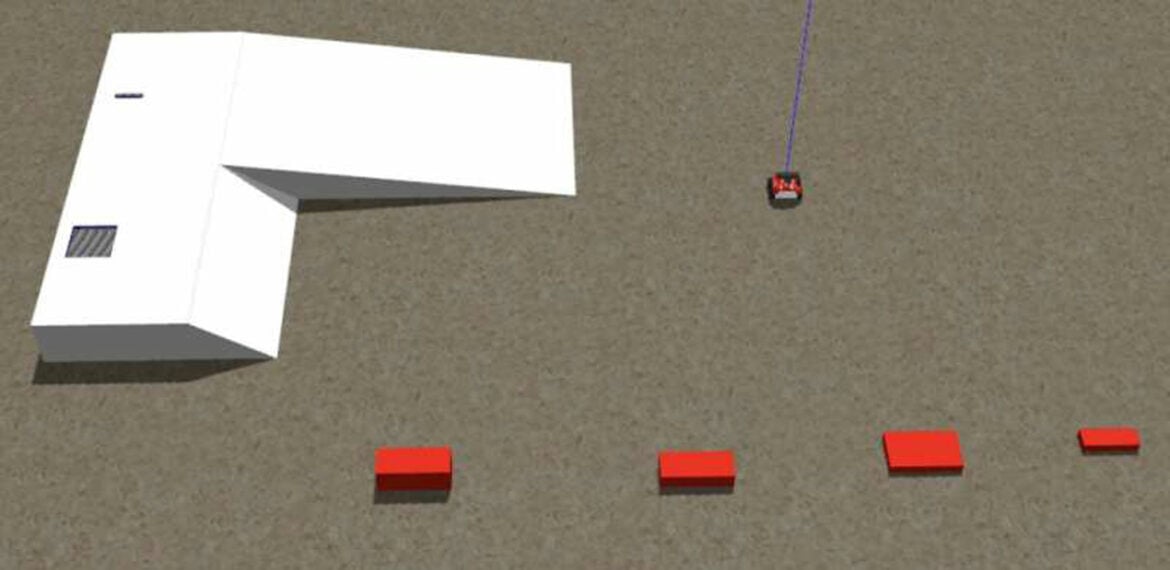
Dergačev i njegove kolege su procenili svoj navigacioni sistem u nizu testova na simuliranim okruženjima, koristeći tri različite elevacijske karte. U ovim testovima, roboti su morali da stignu do određene lokacije dok savladavaju ili zaobilaze tri različite prepreke na svom putu, odnosno skraćeni konus, rampu i neke jame.
Simulirana okruženja korišćena u ovim testovima kreirana su korišćenjem simulatora Gazebo i odlikuju se različitim preprekama i tipovima neravnog terena. Istraživači su testirali efikasnost svog sistema u ovim okruženjima koristeći model robota sa diferencijalnim pogonom na četiri točka.
Dergačev i njegove kolege otkrili su da se njihov sistem pokazao izuzetno dobro u njihovim simulacijama, pri čemu je robot uspešno zaobilazio prepreke i kretao se po neravnim terenima skoro 100% vremena. Međutim, da bi potvrdio svoj potencijal, tim će na kraju morati da ga testira i u stvarnom svetu, koristeći fizičkog robota.
Ako sistem takođe dobro funkcioniše u realnom okruženju, on bi se eventualno mogao prilagoditi i koristiti u daljim istraživanjima. Na kraju, to bi moglo da podstakne razvoj mobilnih robota koji su bolji u navigaciji okruženjima sa neravnim terenima.
„U budućnosti planiramo da stvorimo efikasniju implementaciju MPPI algoritma paralelizacijom proračuna pomoću CUDA/OpenCL alata“, zaključili su istraživači u svom radu. „Druga oblast budućeg rada biće povećanje robusnosti MPPI-ja i prilagođavanje većoj klasi dinamičkih sistema.“


