Istraživači sa Fakulteta inženjeringa Univerziteta nauke i tehnologije u Hong Kongu (HKUST) uspešno su razvili najmanjeg multifunkcionalnog biomedicinskog robota na svetu, koji je 60% manji od trenutnih modela.
Sposoban za snimanje, visokoprecizno kretanje i multifunkcionalne operacije kao što su uzorkovanje, isporuka lekova i laserska ablacija, robot nudi konkurentne performanse snimanja i desetostruko poboljšanje u otkrivanju prepreka, utirući put za robotske primene u uskim i izazovnim kanalima čoveka telo, kao što su bronhi na kraju pluća i jajovodi.
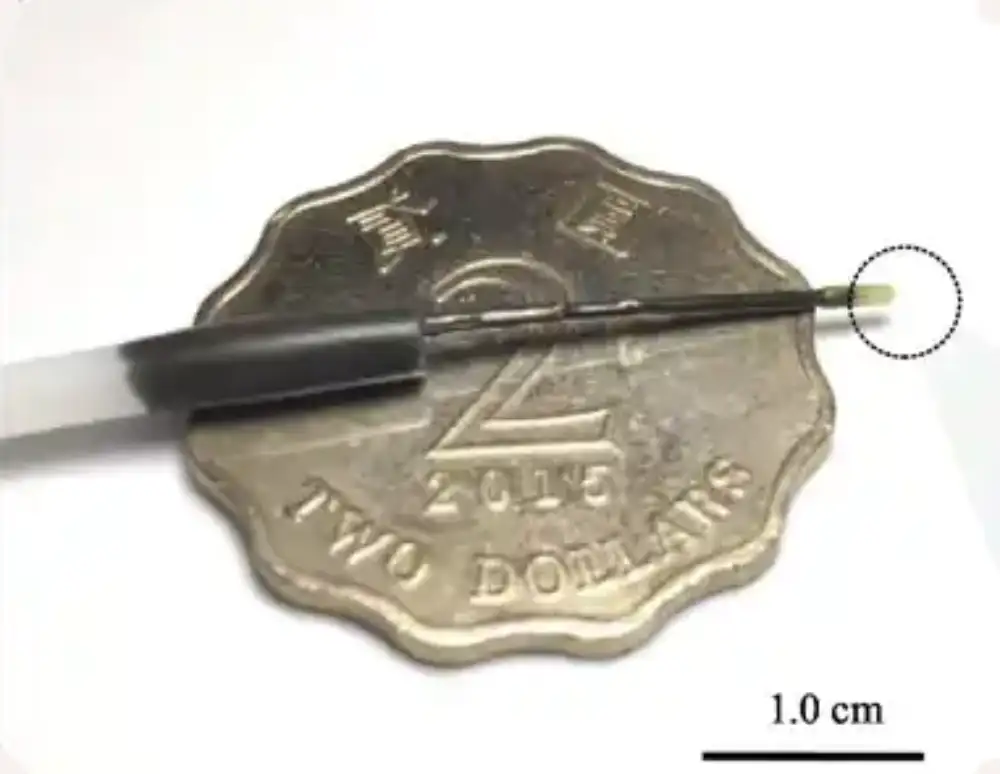
Sa tankim profilom od samo 0,95 mm—60% manjim od sadašnjih endoskopskih robota—ovaj robot je postigao „nemoguće trojstvo“ istovremeno integrišući sve tri značajne specifikacije u jednom robotu. Nudi konkurentne performanse snimanja i proširuje udaljenost detekcije prepreka do ~9,4 mm, što je desetostruko poboljšanje u odnosu na teorijske granice. Takođe postiže izuzetnu preciznost kretanja (manje od 30 μm) i značajno proširuje oblast snimanja za ~25 puta veću od inherentnog prikaza.
Istraživanje je objavljeno u časopisu Nature Communications.
Razvijen od strane prof. Shen Iajinga, vanrednog profesora na Odseku za elektronsko i računarsko inženjerstvo (ECE) i njegovog tima, mala veličina robota je omogućena sa četiri glavne komponente. To uključuje niz optičkih vlakana za snimanje slika unutar tela, prilagođeni alat za isporuku tretmana tačno tamo gde je potrebno, šuplji skelet koji drži vlakna i alate na mestu i funkcionalizovanu kožu koja omogućava preciznu kontrolu pokreta robota.
Šuplji kostur je kreiran 3D štampačem u mikrorazmeri, dok se funkcionalizovana koža proizvodi tehnikom magnetnog spreja, što pomaže da robot ostane mali i omogućava mu da lako klizi tokom operacije. Takođe ima spoljašnji sloj sličan gelu koji smanjuje trenje. Tim je testirao ovog robota u in vitro modelima bronhija i ek vivo svinjskim plućima, demonstrirajući glatku navigaciju u uskim prostorima, dok je uspešno snimao jasne slike i obavljao tretmane u teškim oblastima.
Prof. Shen je rekao da ovaj revolucionarni robot ima ogroman potencijal za kliničku primenu. „Mali kontinualni roboti obećavaju interventnu dijagnozu i lečenje, ali postojeći modeli se često bore sa kompaktnošću, preciznom navigacijom i vizuelizovanim funkcionalnim tretmanom sve u jednom.
„Naša studija pruža značajno rešenje za razvoj hirurškog robota koji ima za cilj postizanje rane dijagnoze i terapijskih ciljeva u teško dostupnim delovima tela. Sa tekućim tehnološkim napretkom, verujemo da će fiberskopski robot dati veći doprinos ljudskom zdravlju u u doglednoj budućnosti“, rekao je on.
Zahvaljujući svojoj sposobnosti da se kreću kroz uske šupljine, istovremeno omogućavajući brz oporavak i nizak rizik od infekcije, mali kontinualni roboti su korišćeni u lečenju nekoliko bolesti, uključujući srčana oboljenja — kroz postavljanje stentova i elektrofizioloških katetera — kao i popravku perforacija kod čira na želucu i dvanaestopalačnom crevu korišćenjem laparoskopije sa jednim portom, između ostalih primena. Nadovezujući se na ovaj uspešan pronalazak, istraživački tim planira da dodatno usavrši karakteristike robota kako bi ih uklopio u praktična podešavanja.
„Nameravamo da dalje optimizujemo dizajn i kontrolu fiberskopskog robota, dajući prioritet bezbednosti i pouzdanosti tokom intervencijske hirurgije. Radujemo se primeni in vivo ispitivanja kako bismo pokazali njegove performanse u kliničkim scenarijima“, rekao je dr Džang Tišan, postdoktorski saradnik na HKUST. On je jedan od dva koautora studije, zajedno sa dr Li Genom. Ostali koautori sa HKUST-a su docent za istraživanje dr Jang Sjong i dr. student Zhao Haokiang, takođe sa ECE odseka.