Roboti se često nalaze u veoma kontrolisanim, zatvorenim okruženjima jer, za razliku od prirodnog okruženja, nema opasnosti od spoticanja koje treba prevazići. Međutim, da bi obavljali važne zadatke poput nadgledanja životne sredine ili traganja i spašavanja, roboti moraju biti u stanju da se kreću kroz grane i vinovu lozu bez vezivanja.
„Kada iznesete robote napolje, čitav problem interakcije sa okolinom postaje eksponencijalno teži jer morate da budete promišljeniji u svemu što radite“, rekao je Dejvid Ologan, student master studija mašinstva. „Vaš sistem mora biti dovoljno robustan da se nosi sa svim nepredviđenim okolnostima ili preprekama na koje možete naići. Zanimljivo je uhvatiti se u koštac sa tim problemom koji još uvek nije nužno rešen.“
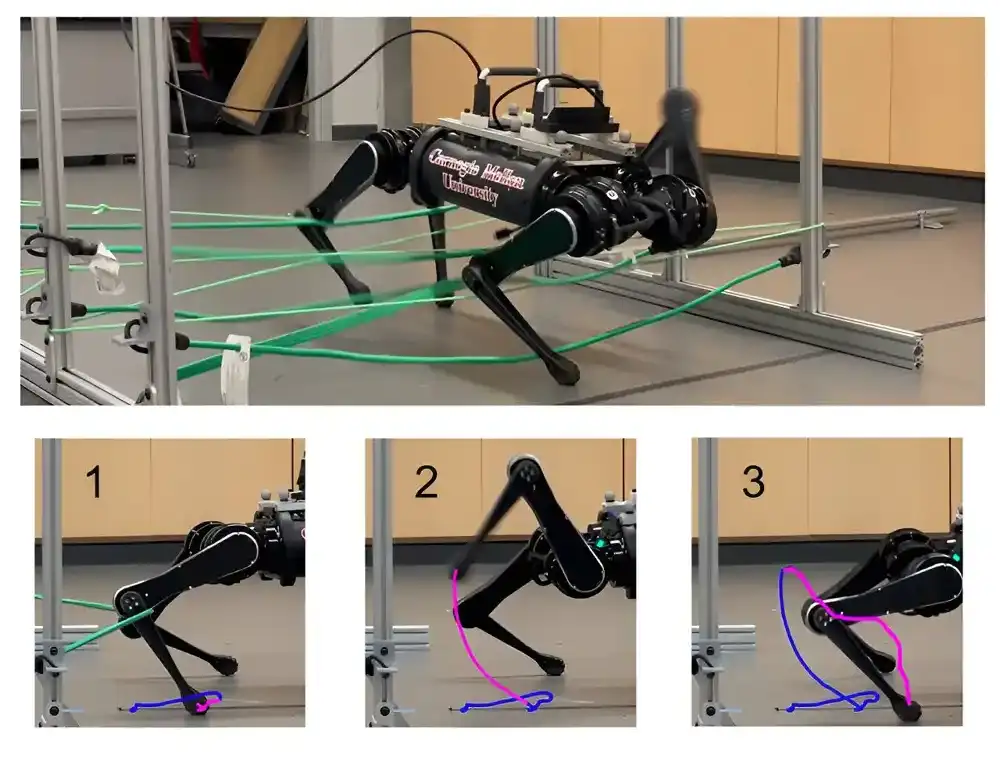
Istraživački tim, predvođen Aronom Džonsonom, vanrednim profesorom mašinstva, koristio je četvoronožnog robota za izradu strategije reaktivnog hodanja. Alternative poput robota na točkovima mogu se zaglaviti u vinovoj lozi ili naneti štetu životnoj sredini.
„Prepreke u stvarnom svetu mogu biti čvrste poput kamena ili meke poput loze, a mi želimo da roboti imaju strategije koje sprečavaju da se spotaknu na oba“, rekao je Justin Iim, profesor inženjerstva na Univerzitetu Ilinois Urbana-Champaign i saradnik na projekat.
Istraživanje pokazuje „posmatrača zasnovanog na impulsu za proprioceptivnu procenu obrtnog momenta zgloba koji je pogodan da klasifikuje kontakte na udovima robota kao zaplete“. To jest, prati kretanje svojih nogu da vidi da li se neka zaglavi na nečemu i ne napreduje.
„Roboti sa nogama mogu da izaberu uporišta i pregaze stvari umesto da samo voze preko svega“, rekao je Ologan. „Problem sa ovim je sa svakim korakom, morate da razmišljate o svojim uporišnim tačkama. Sistem je neverovatno delikatan. Ako naletite na korak, ceo vaš robot može da se prevrne, tako da su nam potrebne metode da odgovorimo na spoljni kontakt.“ Zasluge: Univerzitet Carnegie Mellon, College of Engineering
Okruženje takođe utiče na efikasnost i performanse robota, objašnjava Ologan.
„Zanimljivo je videti potencijal za robote sa nogama u spoljašnjim okruženjima zasnovanim na vegetaciji“, rekao je on. „Ako živite u gradu, platforma sa točkovima je verovatno bolja opcija jer je infrastruktura već postavljena. Postoji kompromis između mogućnosti da obavljate složenije radnje i efikasnosti sa svojim pokretima.“
Sposobnost četvoronožnih robota da hodaju kroz vegetaciju može se koristiti u više polja i aplikacija, rekao je Ologan. Četvoronožaci se sada koriste za ispitivanje naftnih platformi, a poboljšanje njihovih sposobnosti takođe može pomoći u spasilačkim misijama.
Tim je testirao višestruke iteracije Čarlijevog – robotovog – obrasca hodanja. Otkrili su da je najbolja opcija da robot reaktivno uvuče noge da se kreće i otpetljava od prepreka. Druge metode, kao što su iskorak i pristup kolenima napred, nisu bili ni približno tako efikasni. Kroz ovo testiranje, tim je bio u mogućnosti da unapred podesi jednostavan reakcioni pokret nogu da se odvoji od svih otkrivenih zapleta. Ova tehnologija koja pomaže robotima da se raspetljaju takođe se može integrisati u druge robote bez potrebe za modifikacijom njihovog postojećeg hardvera.
„Cela ova strategija reagovanja je samo jedan deo procesa u više koraka“, rekao je Ologan.