Istraživači sa Instituta za robotiku Univerziteta Carnegie Mellon (RI) dizajnirali su sistem koji standardnog četvoronožnog robota čini dovoljno okretnim da hoda uskom gredom za ravnotežu – što je podvig koji je verovatno prvi te vrste.
„Ovaj eksperiment je bio ogroman“, rekao je Zachari Manchester, docent u RI i šef laboratorije za robotsko istraživanje. „Mislim da niko ranije nije uspeo da hoda sa robotom u ravnoteži.“
Prema saznanjima tima, ovo je prvi slučaj da četvoronožac uspešno hoda po uskoj gredi. Njihov rad, „Poboljšana ravnoteža za robote sa nogama koji koriste reakcione točkove“, prihvaćen je na Međunarodnoj konferenciji o robotici i automatizaciji 2023. Godišnja konferencija će se održati od 29. maja do 2. juna u Londonu.
Korišćenjem hardvera koji se često koristi za kontrolu satelita u svemiru, Mančester i njegov tim nadoknađuju postojeća ograničenja u dizajnu četvoronožca kako bi poboljšali njegove sposobnosti balansiranja. Tim Univerziteta Carnegie Mellon dizajnirao je četvoronožni robotski sistem koji može hodati balansnom gredom, verovatno prvi. Zasluge: Univerzitet Carnegie Mellon
Standardni elementi većine modernih četvoronožnih robota uključuju torzo i četiri noge koje se završavaju zaobljenim stopalom, omogućavajući robotu da prelazi osnovne, ravne površine, pa čak i da se penje stepenicama. Njihov dizajn podseća na četvoronožnu životinju, ali za razliku od geparda koji svojim repom mogu da kontrolišu oštre okrete ili padajuće mačke koje prilagođavaju svoju orijentaciju u vazduhu uz pomoć svojih fleksibilnih kičma, četvoronožni roboti nemaju takvu instinktivnu agilnost. Sve dok tri stopala robota ostaju u kontaktu sa tlom, on može izbeći prevrtanje. Ali ako su samo jedna ili dve stope na tlu, robot ne može lako da ispravi smetnje i ima mnogo veći rizik od pada. Ovaj nedostatak ravnoteže čini hodanje po neravnom terenu posebno teškim.
„Sa trenutnim metodama kontrole, telo i noge četvoronožnog robota su odvojene i ne razgovaraju jedni s drugima kako bi koordinirali svoje pokrete“, rekao je Mančester. „Pa kako da poboljšamo njihov balans?“
Rešenje tima koristi sistem pokretača reakcionog točka (RVA) koji se montira na zadnji deo četvoronožnog robota. Uz pomoć nove tehnike kontrole, RVA omogućava robotu da balansira nezavisno od položaja njegovih stopala.
RVA se široko koriste u vazduhoplovnoj industriji za vršenje kontrole položaja na satelitima manipulisanjem ugaonim momentom svemirske letelice.
„U suštini imate veliki zamajac sa pričvršćenim motorom“, rekao je Mančester, koji je na projektu radio sa diplomiranim studentom iz RI Chi-Ien Lee i diplomiranim studentima mašinstva Šuo Jangom i Benjaminom Boksorom. „Ako teški zamajac okrećete u jednom pravcu, satelit će se okretati u drugu stranu. Sada uzmite to i stavite ga na telo četvoronožnog robota.“
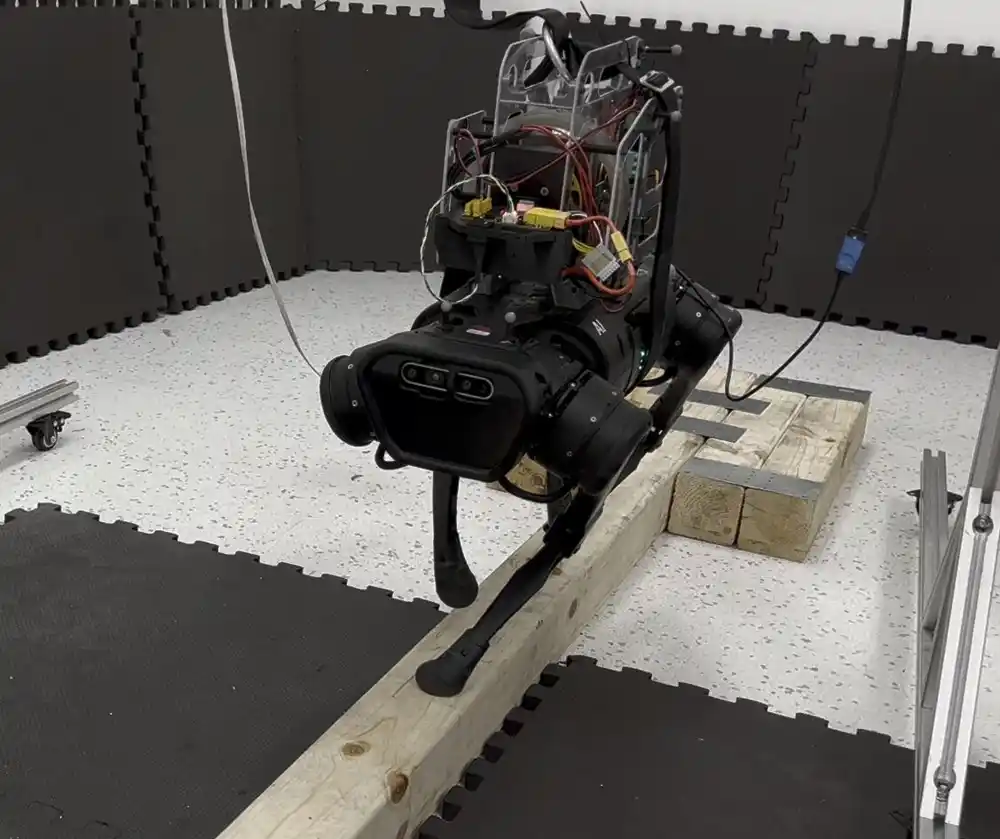
Tim je prototipovao svoj pristup tako što je montirao dva RVA-a na komercijalnog Unitree A1 robota – jedan na osi nagiba i jedan na osi kotrljanja – da bi obezbedio kontrolu nad ugaonim momentom robota. Kod RVA, nije bitno da li su noge robota u kontaktu sa tlom ili ne jer RVA obezbeđuju nezavisnu kontrolu orijentacije tela.
Mančester je rekao da je bilo lako modifikovati postojeći kontrolni okvir kako bi se uračunali RVA jer hardver ne menja distribuciju mase robota, niti ima zglobna ograničenja repa ili kičme. Bez potrebe da se uzimaju u obzir takva ograničenja, hardver se može modelovati kao žirostat (idealizovani model svemirske letelice) i integrisati u standardni algoritam upravljanja koji predviđa model.
Tim je testirao svoj sistem nizom uspešnih eksperimenata koji su pokazali poboljšanu sposobnost robota da se oporavi od iznenadnih udara. U simulaciji su imitirali klasični problem padajuće mačke tako što su robota spustili naopačke sa skoro pola metra, pri čemu su RVA omogućili robotu da se preorijentiše u vazduhu i sleti na noge. Na hardveru su pokazali sposobnost robota da se oporavi od poremećaja – kao i sposobnost sistema za balansiranje – eksperimentom u kojem je robot hodao duž balansne grede širine 6 centimetara.
Mančester predviđa da će četvoronožni roboti uskoro preći sa primarno istraživačkih platformi u laboratorijama na široko dostupne proizvode za komercijalnu upotrebu, slično kao što su dronovi bili pre 10 godina. Uz kontinuirani rad na poboljšanju stabilizacijskih sposobnosti četvoronožnog robota kako bi se uskladio sa instinktivnim četvoronožnim životinjama koje su inspirisale njihov dizajn, mogli bi da se koriste u scenarijima sa visokim ulozima kao što je traganje i spasavanje u budućnosti.
„Četvoronožaci su sledeća velika stvar u robotima“, rekao je Mančester. „Mislim da ćete ih videti mnogo više u divljini u narednih nekoliko godina.“