Istraživači koji su kreirali mekog robota koji je mogao da se kreće jednostavnim lavirintima bez pravca čoveka ili kompjutera sada su izgradili taj posao, stvarajući mekog robota „bez mozga“ koji može da se kreće po složenijim i dinamičnijim okruženjima. Rad, „Physically Intelligent Autonomous Soft Robotic Maze Escaper“, objavljen je 8. septembra u časopisu Science Advances.
„U našem ranijem radu, pokazali smo da je naš mekani robot bio u stanju da se uvija i okreće kroz veoma jednostavnu stazu sa preprekama“, kaže Jie Jin, ko-korespondentni autor rada o radu i vanredni profesor mehanike i vazduhoplovstva inženjering na Državnom univerzitetu Severne Karoline. „Međutim, nije mogao da se okrene osim ako ne naiđe na prepreku. U praktičnom smislu, to je značilo da je robot ponekad mogao da se zaglavi, poskakujući napred-nazad između paralelnih prepreka.
„Razvili smo novog mekog robota koji je sposoban da se sam okreće, omogućavajući mu da se probije kroz uvrnute lavirinte, čak i pregovarajući oko pokretnih prepreka. I sve se to radi pomoću fizičke inteligencije, a ne da ga vodi računar.“
Fizička inteligencija se odnosi na dinamičke objekte—poput mekih robota—čijim ponašanjem upravlja njihov strukturalni dizajn i materijali od kojih su napravljeni, a ne da ih upravlja kompjuterska ili ljudska intervencija.
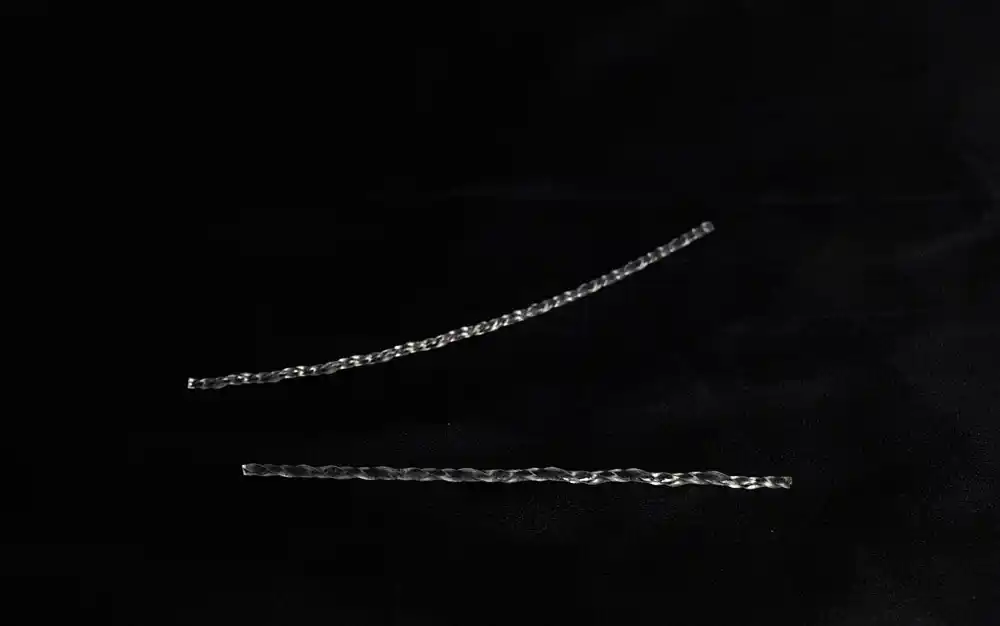
Kao i kod ranije verzije, novi mekani roboti su napravljeni od tečnih kristalnih elastomera nalik vrpci. Kada su roboti postavljeni na površinu koja ima najmanje 55° Celzijusa (131° Farenhajta), koja je toplija od okolnog vazduha, deo trake koji dodiruje površinu se skuplja, dok se deo trake izložen vazduhu skuplja. ne. Ovo izaziva kotrljanje; što je površina toplija, robot se brže kotrlja.
Međutim, dok je prethodna verzija mekog robota imala simetričan dizajn, novi robot ima dve različite polovine. Jedna polovina robota je oblikovana kao uvrnuta traka koja se proteže u pravoj liniji, dok je druga polovina u obliku čvršće uvijene trake koja se takođe uvija oko sebe kao spiralno stepenište.
Ovaj asimetrični dizajn znači da jedan kraj robota vrši više sile na tlu od drugog kraja. Zamislite plastičnu čašu koja ima usta šira od osnove. Ako ga kotrljate preko stola, on se ne kotrlja pravolinijski – pravi luk dok putuje preko stola. To je zbog njegovog asimetričnog oblika. Zasluge: Državni univerzitet Severne Karoline
„Koncept koji stoji iza našeg novog robota je prilično jednostavan: zbog svog asimetričnog dizajna, on se okreće bez potrebe da dođe u kontakt sa objektom“, kaže Iao Zhao, prvi autor rada i postdoktorski istraživač u NC State. „Dakle, iako i dalje menja pravac kada ‘dođe’ u kontakt sa objektom – dozvoljavajući mu da se kreće po lavirintima – ne može da se zaglavi između paralelnih objekata. Umesto toga, njegova sposobnost da se kreće u lukovima omogućava mu da se u suštini slobodno pomera .“
Istraživači su demonstrirali sposobnost asimetričnog dizajna mekog robota da se kreće po složenijim lavirintima – uključujući lavirinte sa pokretnim zidovima – i da se uklapa kroz prostore koji su uži od veličine njegovog tela. Istraživači su testirali novi dizajn robota i na metalnoj površini i na pesku. Video asimetričnog robota u akciji možete videti u nastavku:
„Ovaj rad je još jedan korak napred u pomaganju da razvijemo inovativne pristupe dizajnu mekih robota – posebno za aplikacije u kojima bi meki roboti mogli da sakupljaju toplotnu energiju iz svog okruženja“, kaže Jin.