Dolazimo do tesne tačke u vašoj blizini: CLARI, mali, gnjecavi robot koji može pasivno da promeni svoj oblik da bi se progurao kroz uske praznine – uz malo inspiracije iz sveta buba.
CLARI, što je skraćenica za Compliant Legged Articulated Robotic Insect, dolazi od tima inženjera sa Univerziteta Kolorado Boulder. Takođe ima potencijal da pomogne osobama koje prve reaguju nakon velikih katastrofa na potpuno nov način.
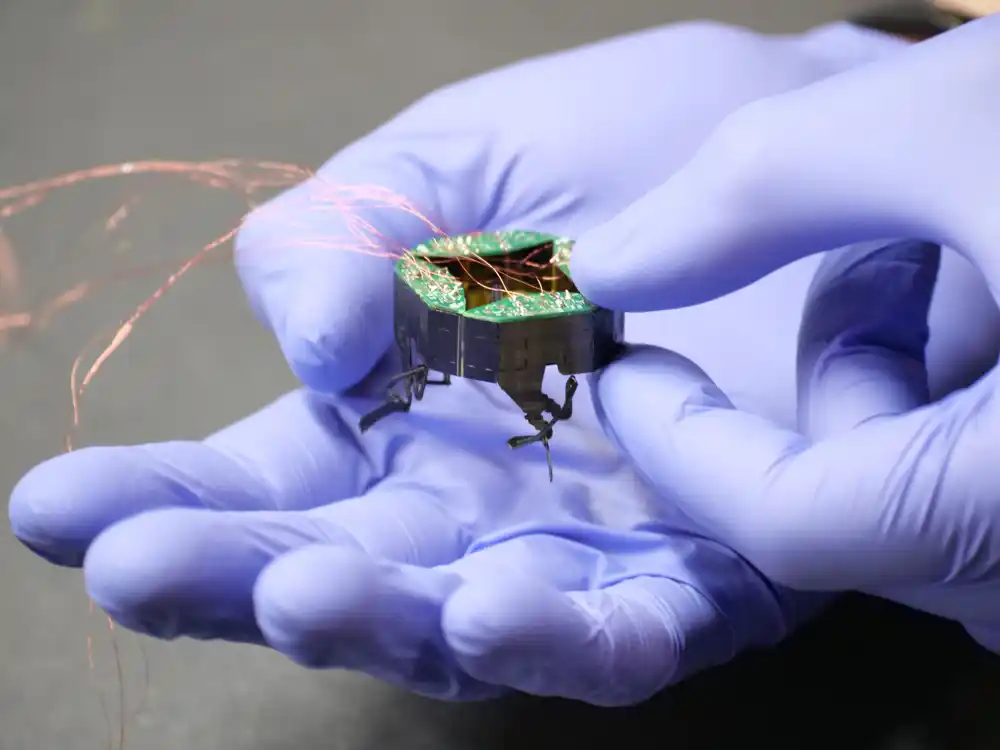
Nekoliko ovih robota može lako da stane na dlan vaše ruke, a svaki je teži manje od loptice za ping pong. CLARI može da transformiše svoj oblik iz kvadratnog u dugačak i vitak kada mu okolina postane skučena, rekla je Heiko Kabutz, doktorant na Odseku za mašinstvo Paul M. Radi.
Kabuc i njegove kolege predstavili su minijaturnog robota u studiji objavljenoj u časopisu Advanced Intelligent Sistems.
Trenutno, CLARI ima četiri noge. Ali dizajn mašine omogućava inženjerima da mešaju i uparuju njene dodatke, što potencijalno dovodi do nekih divljih i vijugavih robota.
„Ima modularan dizajn, što znači da je veoma lako prilagoditi i dodati još nogu“, rekao je Kabutz. „Na kraju bismo želeli da napravimo osmonogog robota u stilu pauka koji bi mogao da hoda preko mreže.
CLARI je još uvek u povoju, dodao je Kaushik Jaiaram, koautor studije i docent mašinstva na CU Boulderu. Robot je, na primer, vezan za žice, koje ga snabdevaju energijom i šalju mu osnovne komande. Ali on se nada da bi, jednog dana, ove male mašine mogle nezavisno da puze u prostore gde nijedan robot nije puzao ranije – poput unutrašnjosti mlaznih motora ili ruševina srušenih zgrada.
„Većina robota danas u osnovi izgleda kao kocka“, rekao je Jaiaram. „Zašto bi sve bile iste? Životinje dolaze u svim oblicima i veličinama.“ Zasluge: Univerzitet Kolorado u Bolderu
Džajaramu nisu stranci roboti koji odražavaju mešavinu životinjskog sveta.
Kao diplomirani student na Kalifornijskom univerzitetu u Berkliju, dizajnirao je robota koji je mogao da se provuče kroz uske prostore sabijanjem na otprilike polovinu svoje visine – baš kao što se bubašvabe probijaju kroz pukotine u zidu. Ali ta mašina, kako je rekao, predstavlja samo vrh ledenog brega kada je u pitanju fleksibilnost životinja.
„Uspeli smo da se provučemo kroz vertikalne praznine“, rekao je on. „Ali to me je navelo na razmišljanje: to je jedan način kompresije. Šta su drugi?“
I tu se CLARI, napravljen da se provuče kroz horizontalne praznine, uvlači u sliku.
U svom najosnovnijem obliku, robot je oblikovan kao kvadrat sa jednom nogom duž svake od četiri strane. Međutim, u zavisnosti od toga kako stisnete CLARI, može postati šira, kao rak, ili izduženija, kao Jaiaramov stari favorit, bubašvaba. Sve u svemu, robot može da se promeni od oko 34 milimetra (1,3 inča) širine u svom kvadratnom obliku do oko 21 milimetara (0,8 inča) širine u svom izduženom obliku.
Za razliku od Jaiaramovog ranijeg mehanizovanog bubašvaba, svaka CLARI-jeva noga funkcioniše skoro kao nezavisni robot — sa sopstvenom štampanom pločom i dvostrukim aktuatorima koji pomeraju nogu napred i nazad i sa jedne na drugu stranu, slično ljudskom zglobu kuka. Teoretski, ta modularnost bi mogla omogućiti CLARI robotima da poprime širok spektar oblika.
„Ono što želimo su roboti opšte namene koji mogu da menjaju oblik i prilagođavaju se bilo kakvim uslovima okoline“, rekao je Jaiaram. „U životinjskom svetu to bi moglo biti nešto poput amebe, koja nema dobro definisan oblik, ali može da se menja u zavisnosti od toga da li treba da se kreće brzo ili da proguta hranu.“
On i Kabutz vide svoj trenutni dizajn kao prvi u nizu CLARI robota za koje se nadaju da će postati manji i okretniji.
U budućim iteracijama, istraživači žele da ugrade senzore u CLARI kako bi mogao da otkrije i reaguje na prepreke. Grupa takođe istražuje kako da robotu da pravu mešavinu fleksibilnosti i snage, rekao je Kabuc – zadatak koji će biti samo teži što tim dodaje više nogu.
Na kraju, tim želi da razvije robote koji menjaju oblik koji se ne kreću samo kroz laboratorijsko okruženje, već i složen, prirodan prostor – u kome će mašine morati da se odbijaju od prepreka poput drveća ili čak vlati trave ili da se probijaju kroz pukotine između stena i nastavi dalje.
„Kada pokušamo da uhvatimo insekta, oni mogu nestati u procepu“, rekao je Kabuc. „Ali ako imamo robote sa mogućnostima pauka ili muve, možemo da dodamo kamere ili senzore, i sada možemo da počnemo da istražujemo prostore u koje ranije nismo mogli da uđemo.“