Veštačka inteligencija (AI) u kombinaciji sa novom bio-inspirisanom kamerom postiže 100 puta brže otkrivanje pešaka i prepreka od trenutnih automobilskih kamera. Ovaj važan korak za kompjuterski vid i veštačku inteligenciju koji su postigli istraživači sa Univerziteta u Cirihu može u velikoj meri poboljšati bezbednost automobilskih sistema i automobila koji se samostalno voze.
To je noćna mora svakog vozača: pešak izlazi ispred automobila naizgled niotkuda, ostavljajući samo delić sekunde da zakoči ili upravlja volanom i izbegne ono najgore. Neki automobili sada imaju sisteme kamera koje mogu upozoriti vozača ili aktivirati kočenje u slučaju nužde. Ali ovi sistemi još uvek nisu dovoljno brzi ili pouzdani i moraće da se dramatično poboljšaju ako se žele koristiti u autonomnim vozilima u kojima nema ljudi za volanom.
Sada, Daniel Gehrig i Davide Scaramuzza sa Odseka za informatiku na Univerzitetu u Cirihu (UZH) su kombinovali novu bio-inspirisanu kameru sa veštačkom inteligencijom kako bi razvili sistem koji može da detektuje prepreke oko automobila mnogo brže od trenutnih sistema i koristeći manje računarskih sredstava. snaga . Studija je objavljena u časopisu Priroda.
Većina aktuelnih kamera je zasnovana na okvirima, što znači da prave snimke u redovnim intervalima. Oni koji se trenutno koriste za pomoć vozaču na automobilima obično snimaju 30 do 50 kadrova u sekundi, a veštačka neuronska mreža može biti obučena da prepozna objekte na njihovim slikama — pešake, bicikle i druge automobile.
„Ali ako se nešto desi tokom 20 ili 30 milisekundi između dva snimka, kamera će to možda videti prekasno. Rešenje bi bilo povećanje brzine kadrova, ali to se prevodi u više podataka koji treba da se obrađuju u realnom vremenu i više računara. moć“, kaže Gerig, prvi autor rada.
Kombinovanje najboljeg od dva tipa kamera sa AI
Kamere za događaje su nedavna inovacija zasnovana na drugačijem principu. Umesto konstantne brzine kadrova, oni imaju pametne piksele koji snimaju informacije svaki put kada otkriju brze pokrete.
„Na ovaj način nemaju slepu tačku između kadrova, što im omogućava da brže detektuju prepreke. Nazivaju se i neuromorfnim kamerama jer oponašaju način na koji ljudske oči percipiraju slike“, kaže Skaramuca, šef grupe za robotiku i percepciju. Ali oni imaju svoje nedostatke: mogu propustiti stvari koje se kreću sporo i njihove slike se ne pretvaraju lako u vrstu podataka koja se koristi za obuku AI algoritma.
Gerig i Skaramuca su smislili hibridni sistem koji kombinuje najbolje iz oba sveta: uključuje standardnu kameru koja prikuplja 20 slika u sekundi, što je relativno niska brzina kadrova u poređenju sa onima koji se trenutno koriste. Njegove slike obrađuje AI sistem, nazvan konvoluciona neuronska mreža, koja je obučena da prepozna automobile ili pešake.
Podaci sa kamere za događaje su povezani sa drugačijim tipom AI sistema, nazvanom neuronska mreža asinhrone grafove, koja je posebno pogodna za analizu 3D podataka koji se menjaju tokom vremena. Detekcije sa kamere za događaje se koriste za predviđanje otkrivanja standardne kamere i za poboljšanje njenih performansi.
„Rezultat je vizuelni detektor koji može da detektuje objekte jednako brzo kao što bi to uradila standardna kamera koja snima 5.000 slika u sekundi, ali zahteva isti propusni opseg kao standardna kamera od 50 kadrova u sekundi“, kaže Gerig.
Tim je testirao svoj sistem u odnosu na najbolje kamere i vizuelne algoritme koji su trenutno na automobilskom tržištu, otkrivši da to dovodi do sto puta bržih detekcija uz smanjenje količine podataka koji se moraju preneti između kamere i kompjutera na vozilu, kao i računarskih snaga potrebna za obradu slika bez uticaja na tačnost.
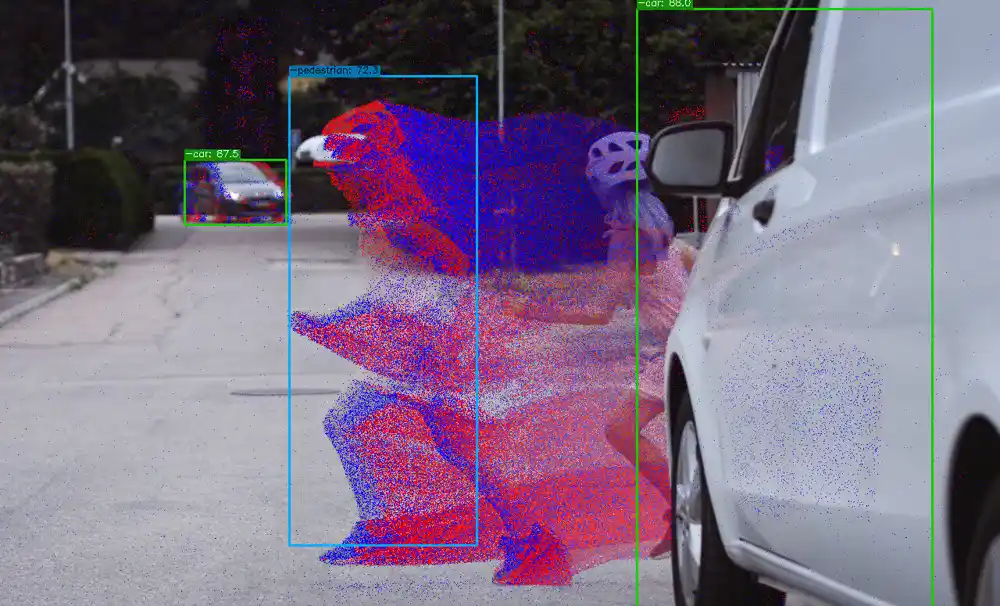
Ono što je najvažnije, sistem može efikasno da otkrije automobile i pešake koji ulaze u vidno polje između dva sledeća okvira standardne kamere, pružajući dodatnu bezbednost i vozaču i učesnicima u saobraćaju — što može da napravi ogromnu razliku, posebno pri velikim brzinama.
Prema naučnicima, metoda bi u budućnosti mogla biti još moćnija integracijom kamera sa LiDAR senzorima, poput onih koje se koriste na automobilima koji se sami voze.
„Hibridni sistemi poput ovog mogli bi biti ključni za omogućavanje autonomne vožnje, garantujući sigurnost bez dovođenja do značajnog rasta podataka i računarske snage“, kaže Scaramuzza.


