U julu 2020, kineska misija Tianven-1 stigla je u orbitu oko Marsa, koja se sastoji od šest robotskih elemenata: orbitera, lendera, dve kamere koje se mogu postaviti, daljinske kamere i rovera Zhurong.
Kao prva u nizu međuplanetarnih misija Kineske nacionalne svemirske administracije (CNSA), svrha misije je istraživanje geologije i unutrašnje strukture Marsa, karakterizacija njegove atmosfere i traženje indikacija vode na Marsu.
Kao i mnogi orbiteri, lenderi i roveri koji trenutno istražuju Mars, Tianven-1 takođe traži moguće dokaze o životu na Marsu (prošlost i sadašnjost).
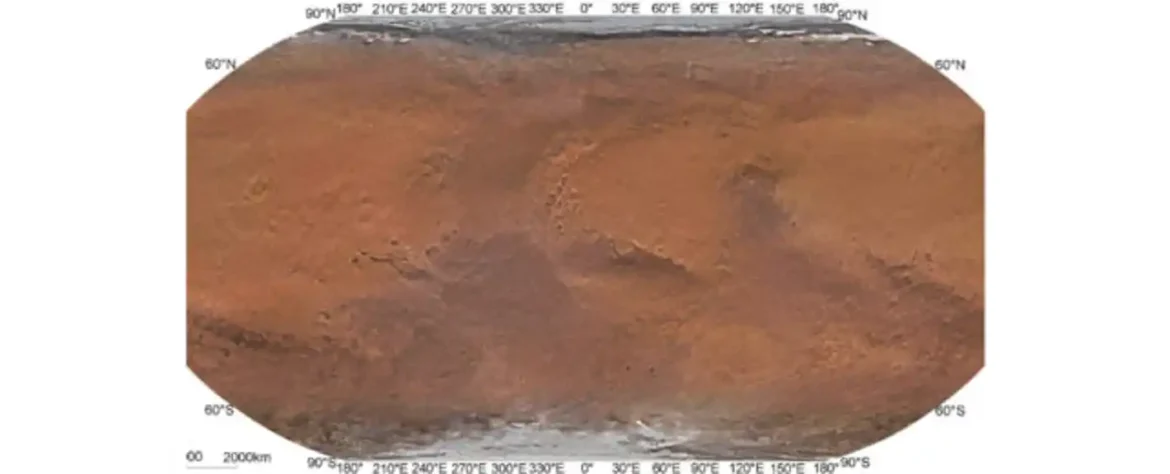
Za skoro 1298 dana koliko je misija Tianven-1 istraživala Mars, njen orbiter je stekao bezbroj snimaka površine Marsa pomoću daljinskog senzora. Zahvaljujući timu istraživača iz Kineske akademije nauka (CAS), ove slike su kombinovane da bi se napravila prva globalna mapa Marsa u boji visoke rezolucije sa prostornim rezolucijama većim od 1 km (0,62 mi). Ovo je trenutno mapa Marsa u najvišoj rezoluciji i mogla bi da posluži kao globalna osnovna mapa koja će jednog dana podržati misije sa posadom.
Tim su predvodili profesor Li Čunlai iz Nacionalne astronomske opservatorije Kine (NOAC) i profesor Džang Rongćiao iz Centra za istraživanje Meseca i svemirsko inženjerstvo. Njima su se pridružile brojne kolege iz Ključne laboratorije za istraživanje Meseca i dubokog svemira, Instituta za optiku i elektroniku, Univerziteta Kineske akademije nauka i Šangajskog instituta za tehničku fiziku. Rad koji detaljno opisuje njihovo istraživanje, „Globalni skup podataka u boji od 76 m po pikselu i mapa Marsa od Tianven-1“, nedavno se pojavio u časopisu Science Bulletin.
Nekoliko globalnih mapa Marsa je kreirano korišćenjem slika daljinskog senzora dobijenih instrumentima na šest prethodnih misija. Ovo uključuje sisteme vizuelnog snimanja sonde Mariner 9, orbitera Viking 1 i 2, širokougaone kamere Mars Orbiter (MOC-VA) na brodu Mars Global Surveior (MGS), Contekt Camera (CTKS) na brodu Mars Reconnaissance Orbiter (MRO), stereo kamera visoke rezolucije (HRSC) kompanije Mars Ekpress (MEKS) i sistem za snimanje termalne emisije (THEMIS) na orbiteru Mars Odissei.
Međutim, sve ove mape su imale prostornu rezoluciju znatno manju od one koju je CAS tim napravio koristeći slike dobijene sa orbitera Tianven-1. Na primer, MGS MOC-VA Atlas Mosaic ima prostornu rezoluciju od 232 metra po pikselu (280 jardi po pikselu) u vidljivom opsegu, a THEMIS Global Mosaic misije Mars Odissei nudi prostornu rezoluciju od približno 100 m/piksel (~110 stopa/piksel) u infracrvenom opsegu. Dok je MRO Global CTKS mozaik Marsa pokrivao 99,5% površine Marsa (88° severno do 88° južno) u vidljivom pojasu, ima prostornu rezoluciju od oko 5 m/piksel (5,5 jardi/piksel).
Takođe je nedostajalo globalnih slika u boji Marsa sa prostornim rezolucijama od sto metara (110 jardi) ili više. Što se tiče globalnih slika u boji, Mars Viking Colorized Global Mosaic v1 i v2 imaju prostorne rezolucije od približno 925 m/piksel i 232 m/piksel (~1010 i 255 jardi/piksel), respektivno.
U međuvremenu, instrument MoRIC je dobio 14.757 slika tokom više od 284 orbite koje je izvršio orbiter Tianven-1, sa prostornim rezolucijama između 57 i 197 m (62 i 215 jardi).
Tokom istog vremena, Tianven-1-ov Mars Mineralogical Spectrometer je prikupio ukupno 325 traka podataka u vidljivom i bliskom infracrvenom opsegu, sa prostornim rezolucijama koje variraju od 265 do 800 m (290 do 875 jardi).
Prikupljene slike su takođe postigle globalnu pokrivenost površine Marsa. Koristeći ove podatke, profesor Li Chunlai, profesor Zhang Rongkiao i njihove kolege obrađivali su slikovne podatke koji su doveli do ove najnovije globalne mape Marsa. Tim je takođe optimizovao originalne podatke merenja orbite koristeći tehnologiju podešavanja paketa.
Tretirajući Mars kao jedinstvenu mrežu prilagođavanja, tim je uspeo da smanji odstupanje položaja između pojedinačnih slika na manje od jednog piksela i stvori „bešavni“ globalni mozaik.
Prave boje površine Marsa postignute su zahvaljujući podacima koje je prikupio MMS, dok je korekcija boja omogućila globalnu uniformnost boja. Sve ovo je kulminiralo izdavanjem Tianven-1 Mars Global Color Orthomosaic 76 m v1, koji ima prostornu rezoluciju od 76 m (83 jarda) i horizontalnu preciznost od 68 m (74 jarda).
Ova mapa je trenutno globalna mapa Marsa u pravim bojama najviše rezolucije i značajno poboljšava rezoluciju i autentičnost boja prethodnih mapa Marsa.
Ova mapa bi mogla da posluži kao geografska referenca za druge svemirske agencije i partnerske organizacije da mapiraju površinu Marsa sa još većom rezolucijom i detaljima. Svemirske agencije bi ga takođe mogle koristiti za odabir lokacija za buduće robotske istraživače koji će nastaviti da traže tragove o prošlosti Marsa.
Takođe bi moglo biti od koristi kada NASA i Kina pošalju misije sa posadom na Mars, koje bi trebalo da počnu početkom 2030-ih ili 2040-ih.


