Naučnici sa Univerziteta Virdžinija (UVA) i Harvarda napravili su veliki korak ka razumevanju kako se ribe kreću kroz vodu, što bi moglo revolucionisati dizajn bioinspirisanih robota. Ova nova otkrića, objavljena u prestižnom časopisu American Scientist u izdanju za jul-avgust 2024, bacaju svetlo na ulogu peraja u stvaranju potiska i efikasnijem kretanju, što se sada može primeniti u robotskim sistemima. Tim profesora Haiba Donga sa UVA, u saradnji sa dr. studentom Jiachengom Guoom i profesorom Džordžom V. Lauderom sa Harvarda, otkrio je kako međusobna interakcija vrtloga koje stvaraju različita peraja ribe omogućava efikasnije plivanje.
Fokus istraživanja bio je na ribljem analnom peraju, koje je smešteno ispod repnog peraja. Iako je dugo poznato da repno peraje igra ključnu ulogu u stvaranju potiska, ovo istraživanje po prvi put pruža uvid u to kako analno peraje pojačava taj potisak stvaranjem dodatnih vrtloga koji se kombinuju sa vrtlozima repnog peraja. Ovaj složeni mehanizam omogućava ribama da plivaju brže i sa većom efikasnošću.
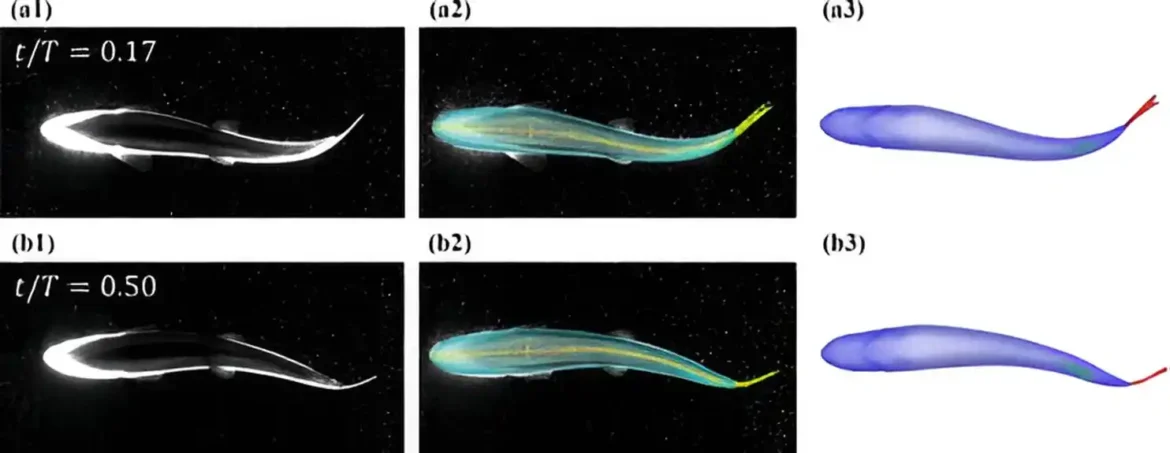
Istraživanje je započeto na Univerzitetu Harvard, gde je tim profesora Laudera snimio visokorezolucione video zapise kalifornijskih pastrmki dok su plivale u akvarijumima ispunjenim fluorescentnim česticama. Ove čestice omogućile su vizualizaciju kako se voda kreće oko tela ribe, otkrivajući obrasce vrtloga koji nastaju tokom plivanja. Zatim su ovi podaci analizirani na Univerzitetu Virdžinija, gde su naučnici razvili 3D računarske modele i simulacije kako bi detaljno proučili interakcije između peraja.
Rezultati su pokazali da su ribe evoluirale na način da njihova peraja funkcionišu u savršenom skladu, optimizujući potisak i smanjujući otpor. Konkretno, turbulencija koju stvara analno peraje deluje kao „turbopunjač“ za repno peraje, što omogućava ribama da troše manje energije tokom dugih plivačkih podviga, kao što je migracija uzvodno tokom mresta. Kada bi se analno peraje pomerilo ili promenilo u veličini, efikasnost plivanja bi značajno opala, što ukazuje na ključnu ulogu ovog peraja u dinamici plivanja.
Profesor Dong, stručnjak za dinamiku fluida, biologiju i robotiku, istakao je značaj ovih otkrića za dalji razvoj bioinspirisanih robota. „Naši rezultati približavaju nas repliciranju izvanrednih plivačkih sposobnosti riba u inženjerskim dizajnima,“ rekao je Dong. „Već vidimo robote inspirisane ribama koji koriste više peraja za postizanje veće brzine i efikasnosti.“
Dongov tim, koji je deo interdisciplinarnog istraživačkog centra Link Lab na UVA, trenutno radi na primeni ovih saznanja u oblasti robotike, gde se bioinspirisani dizajni sve više koriste za različite industrijske i naučne primene. Ovi roboti, dizajnirani prema obrascima kretanja riba, mogli bi da nađu primenu u podvodnim istraživanjima, spasilačkim misijama ili u energetskim sistemima koji koriste pokrete talasa za proizvodnju energije.
Dalje, tim sada proučava kako peraja funkcionišu u scenarijima grupnog plivanja, kao što je formiranje jata. Postoji rastuće interesovanje za razumevanje uloge peraja u ovim složenim kolektivnim ponašanjima, što bi moglo otvoriti nove mogućnosti za dizajn robota koji oponašaju ponašanje životinja u grupi.
Uz pomoć najnovijih tehnologija snimanja i simulacija, laboratorija profesora Donga nastavlja da istražuje skrivena biomehanička rešenja prirode, omogućavajući da se biološka inspiracija pretvori u inženjerske inovacije koje mogu značajno unaprediti oblast robotike i dizajna.