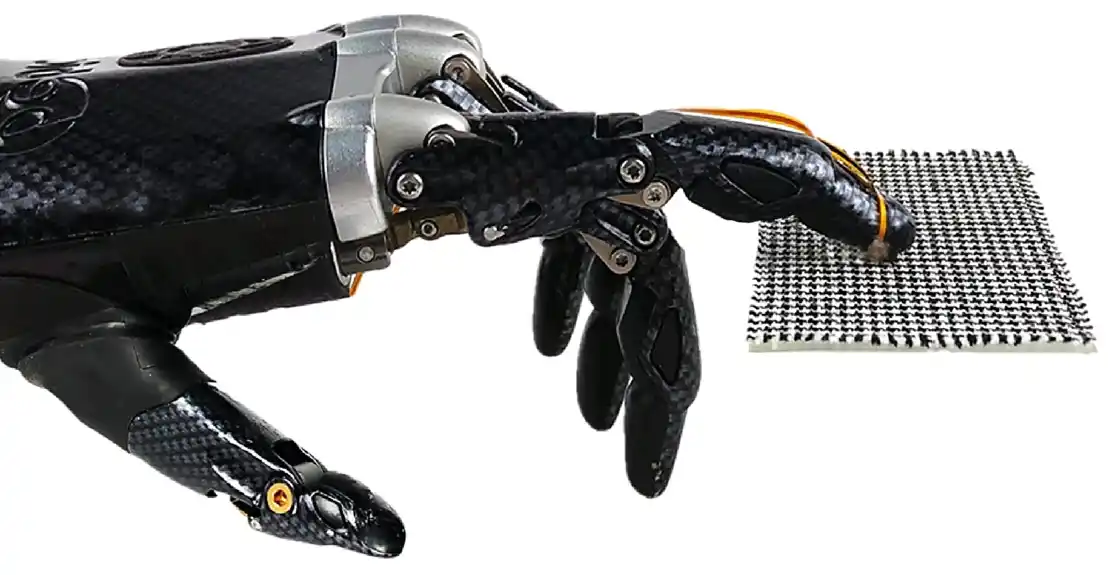
Veštački senzorni sistem koji je u stanju da prepozna fine teksture – kao što su keper, sumot i vuna – sa visokom rezolucijom, slično ljudskom prstu, objavljen je u časopisu Nature Communications. Nalazi mogu pomoći u poboljšanju sposobnosti suptilnog taktilnog osećaja robota i protetike ljudskih udova i mogli bi se primeniti na virtuelnu stvarnost u budućnosti, sugerišu autori.
Ljudi mogu nežno kliziti prstom po površini objekta i identifikovati ga tako što će uhvatiti statički pritisak i visokofrekventne vibracije. Raniji pristupi stvaranju veštačkih taktilnih senzora za detekciju fizičkih stimulansa, kao što je pritisak, bili su ograničeni u svojoj sposobnosti da identifikuju objekte iz stvarnog sveta na dodir, ili se oslanjaju na više senzora. Stvaranje veštačkog senzornog sistema u realnom vremenu sa visokom prostorno-vremenskom rezolucijom i osetljivošću bilo je izazovno.
Chuan Fei Guo i kolege predstavljaju fleksibilni senzor klizanja koji oponaša karakteristike ljudskog otiska prsta kako bi omogućio sistemu da prepozna male karakteristike na površinskim teksturama kada dodiruje ili klizi senzor po površini. Autori su integrisali senzor u protetsku ljudsku ruku i dodali mašinsko učenje sistemu.
Otkrili su da je senzor sposoban da uhvati suptilne taktilne signale i identifikuje 20 različitih tekstila – uključujući lan, najlon, poliester i šrafove – sa do 100% preciznosti.