Istraživači su kombinovali istraživanja sa stvarnim i robotskim insektima kako bi bolje razumeli kako osećaju sile u svojim udovima dok hodaju, pružajući nove uvide u biomehaniku i neuronsku dinamiku insekata i informišući o novim aplikacijama za velike robote sa nogama. Svoje nalaze su predstavili na SEB Centenari Conference 2023.
Campaniform sensilla (CS) su receptori sile koji se nalaze u udovima insekata koji reaguju na stres i naprezanje, pružajući važne informacije za kontrolu kretanja. Slični receptori sile postoje kod sisara poznatih kao golgijevi tetivni organi, što sugeriše da razumevanje uloge senzora sile kod insekata može takođe pružiti novi uvid u njihove funkcije kod kičmenjaka kao što su ljudi.
„Proučavam ulogu senzora sile u hodanju insekata jer su ovi senzori kritični za uspešnu lokomociju“, kaže dr Szczecinski, docent na Odseku za mašinstvo i vazduhoplovstvo na Statler koledžu za inženjerstvo i mineralne resurse na Univerzitetu Zapadne Virdžinije. , SAD „Povratne informacije koje daju su kritične za pravilno držanje i koordinaciju.“
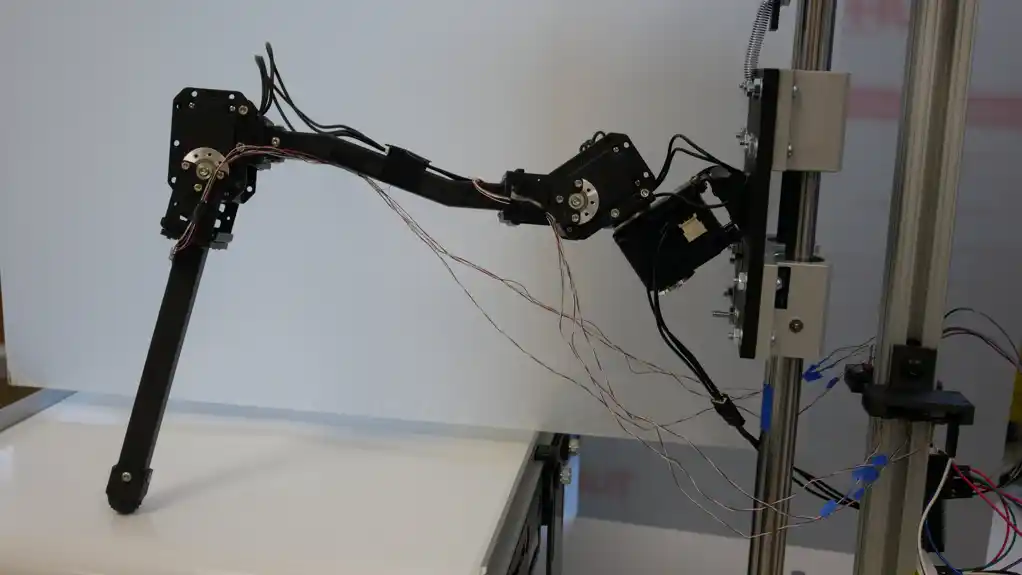
Prednosti izgradnje robotskih modela u odnosu na kompjuterske modele uključuju realnije modeliranje trenja između pokretnih delova i uključivanje kašnjenja za slanje neuronskih signala. Robotski udovi takođe imaju prednost što mogu da snime slanje i prijem svakog pojedinačnog signala i rezultirajuće mehaničke radnje, što nije moguće kod životinja. Drosophibot II hoda. Zasluge: Nicholas Szczecinski
„Hodanje je inherentno mehanički zadatak, tako da razumevanje neuronske kontrole hodanja zahteva istovremeno istraživanje mehanike i neuronske kontrole“, kaže dr Ščećinski. „Roboti za hodanje koji pravilno funkcionišu mogu poslužiti kao prototipovi mašina koje bi mogle pomoći ljudima da se bave farmama na ekstremnim terenima, istražuju druge planete ili hodaju kroz šume kako bi nadgledali svoje zdravlje.
Dr Szczecinski ima dva glavna istraživačka robota: prvi je biomimetički robot zasnovan na voćnoj mušici (Drosophila melanogaster) koja hoda na šest nogu, omogućavajući timu da uhvati potpunu sliku o tome kako kampaniformna sensila prati sile tokom hodanja. Drugi robot je jedna noga, što omogućava pojednostavljenu simulaciju senzornog iskustva jedne noge insekta tokom hodanja.
Dr Szczecinski takođe istražuje ulogu CS-a kod stvarnih insekata tako što izoluje njihove udove i prati senzorne puteve pomoću elektroda kada se primenjuju različite sile. Ovi snimljeni senzorni signali se zatim koriste za razvoj modela za robotske noge.
„Snimanjem njihovog odgovora na mnogo različitih signala, možemo da napravimo jasniju sliku o tome kako oni pretvaraju sile u neuronske aktivnosti“, kaže dr Ščećinski. „Koristimo mnogo različitih stimulansa jer su CS veoma dinamični i uvek se prilagođavaju primenjenim silama.“
Istraživanje dr Szczecinski je otkrilo veoma jake korelacije između njihovih pravih insekata i robotskih pandana. „Utvrdili smo da je za svaku vrstu insekata koju proveravamo naš model podjednako dobro opremljen da opiše način na koji CS pretvara sile u neuronsku aktivnost“, kaže dr Ščećinski. „Ovo sugeriše da organi svake vrste uglavnom funkcionišu na isti način.“