Tim inženjera sa Univerziteta Beihang, u saradnji sa kolegom sa Univerziteta Tsinghua, oba u Kini, dizajnirao je, napravio i testirao haptički kontrolisanu robotsku ruku hobotnice koja je sposobna da uhvati, podiže i nosi predmete na kopnu i pod vodom. U članku objavljenom u časopisu Science Robotics, grupa opisuje kako su napravili svog robota, kako funkcioniše i koliko dobro se pokazao kada je testiran pod različitim scenarijima.
Dugi niz godina, naučnici su proučavali ponašanje hobotnice — njene mnoge vrste su razvile mnoštvo načina da koriste rastegljive ruke sa gumenim čepovima duž donje površine da bi podigli predmete, branili se i šuljali po morskom dnu. Istraživači su nastojali da razviju robote sa sličnim mogućnostima. U ovom novom naporu, tim u Kini je pronašao način da stvori ruku robota koja verno replicira ponašanje ruke hobotnice.
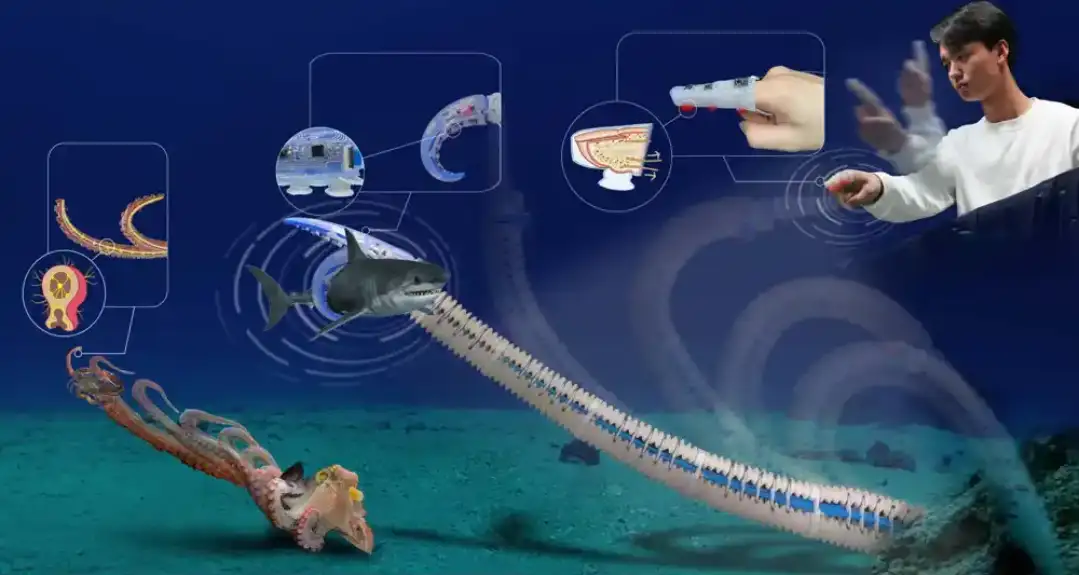
Robot koji je tim napravio veoma liči na pravu stvar. Ima oblik pipaka i može da se savija, rasteže i razvija na zahtev. Takođe može primeniti vakuumski pritisak unutar čaša na donjoj strani, koji može koristiti za hvatanje predmeta. I to čini tako što se prvo uvija oko njih. Robotska ruka sa tradicionalnom kinematikom ne uspeva da uhvati objekat.
Istraživački tim objašnjava da su svoj pipak naterali da se uvije programirajući matematičko širenje njegovih pet segmenata. Zajedno, segmenti i njihova unutrašnjost čine mrežu koja imitira nervni sistem ruke hobotnice. Električne poruke se šalju pomoću žica od tečnog metala kako bi se omogućila maksimalna fleksibilnost.
Vrhovi imaju i usisne čaše i senzore temperature. Rad robota se kontroliše bežično, okretanjem prsta u rukavici. Pristup omogućava ne samo kontrolu uvijanja ruke, već i nagib, kotrljanje i ubrzanje. Bio-inspirisana ruka hobotnice hvata predmet.
Da bi omogućili preciznu kontrolu, istraživači su dodali i senzorni sistem povratnih informacija, koji omogućava operateru da oseti šta robotska ruka dodiruje svojim vrhovima sisaljki. Senzacije se pružaju kontroloru preko malih usisnih čašica ugrađenih unutar rukavice. Testiranje je pokazalo da je takva povratna informacija bila dovoljno tačna da omogući operateru da pronađe i zgrabi predmete kao što su ajkule igračke i lopte sa pokrivenim očima.
Istraživački tim napominje da njihova ruka hobotnice podjednako dobro funkcioniše i u vlažnom i u suvom okruženju.