Roboti su često veoma efikasni kada imaju specifičan zadatak, poput postavljanja limenke na transportnu traku. Međutim, u manje strukturiranim okruženjima, kao što su domaćinstva, zadaci postaju mnogo složeniji. Čak i jednostavne radnje, poput odvijanja sijalice, mogu predstavljati izazov zbog mehanizama „zapešća“ koji roboti koriste.
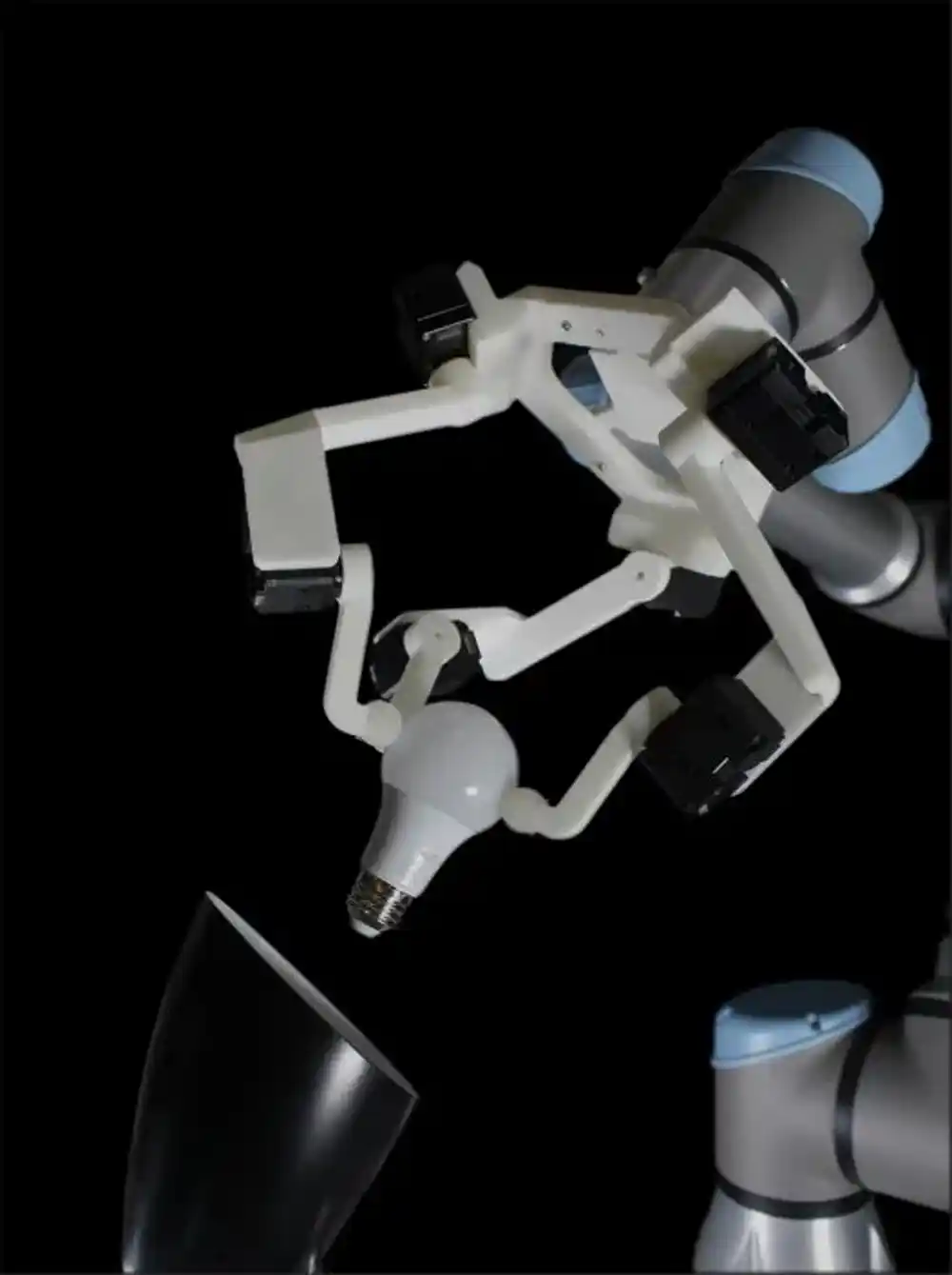
Istraživači sa Yale-a razvili su novu robotizovanu ruku pod nazivom Sphinx, koja koristi sferni mehanizam. Ovaj mehanizam omogućava robotu da hvata i rotira širok spektar objekata u svim pravcima, kombinujući funkcije tradicionalnih zapešća i hvatača.
Vatsal Patel, vodeći autor istraživanja, ističe da dizajn nije previše složen i ne zahteva senzore ili kamere. Zbog sfernog mehanizma, ruka može efikasno rotirati objekte bez potrebe za pomeranjem cele ruke, što omogućava brže i efikasnije pokrete.
Ovaj dizajn olakšava robotima obavljanje zadataka u ograničenim prostorima, kao što je uvijanje sijalice u ormaru. Na širem nivou, ova tehnologija približava istraživače cilju dizajniranja robota koji će dobro funkcionisati u domaćinstvima, na mestima katastrofa i u drugim neuređenim okruženjima.
Patel naglašava da roboti u ovim okruženjima ne znaju tačno gde se objekti nalaze i pokušavaju da se prilagode. Ova istraživanja su korak ka rešavanju problema sa kojima se robotika suočava u svakodnevnom životu.
Dodatne informacije o istraživanju i dizajnu Sphinx ruke dostupne su putem Yale OpenHand projekta, koji nudi otvorene izvore za dalje istraživanje.


