Inspirisani malim i sporim pužem, naučnici su razvili protip robota koji bi jednog dana mogao da sakuplja mikroplastiku sa površina okeana, mora i jezera.
Dizajn robota je zasnovan na havajskom pužu od jabuke (Pomacea canaliculate), običnom akvarijumskom pužu koji koristi talasasto kretanje stopala da pokreće površinski tok vode i usisava plutajuće čestice hrane.
Trenutno se uređaji za sakupljanje plastike uglavnom oslanjaju na vučne mreže ili transportne trake za prikupljanje i uklanjanje većih plastičnih ostataka iz vode, ali im nedostaje fina skala potrebna za vađenje mikroplastike. Ove sitne čestice plastike mogu da se progutaju i završe u tkivima morskih životinja, ulazeći u lanac ishrane gde postaju zdravstveni problem i potencijalno kancerogene za ljude. Plastični otpad čini 80% ukupnog zagađenja mora, sa 8 do 10 miliona metričkih tona plastike koja svake godine završi u okeanu, prema Ekonomskom i socijalnom savetu Ujedinjenih nacija.
„Bili smo inspirisani načinom na koji ovaj puž sakuplja čestice hrane na interfejsu [vode i vazduha] da bismo konstruisali uređaj koji bi mogao da sakuplja mikroplastiku u okeanu ili na površini vodenog tela“, rekao je Sungvan „Suni“ Jung, profesor i direktor diplomske studije na Odseku za biološko inženjerstvo i inženjerstvo životne sredine na Visokoj školi za poljoprivredu i životne nauke (CALS). Jung je stariji autor studije „Optimalno pumpanje slobodne površine talasastim tepihom“, koja je objavljena na mreži u Nature Communications. Inspirisani malim i sporim pužem, naučnici u Kornelu razvili su porotip robota koji bi jednog dana mogao da sakuplja mikroplastiku sa površina okeana, mora i jezera. Zasluge: Džejson Koski / Univerzitet Kornel
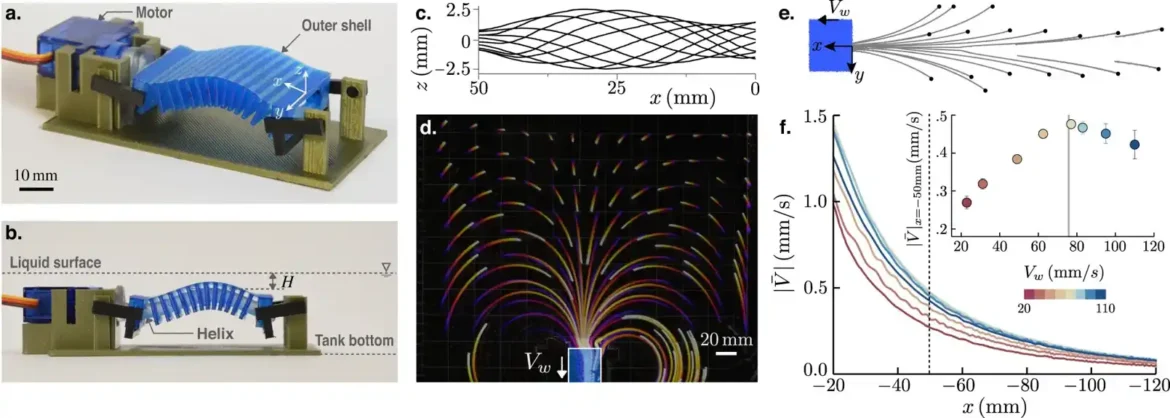
Prototip, modifikovan iz postojećeg dizajna, trebalo bi da se poveća da bi bio praktičan u stvarnom svetu. Istraživači su koristili 3D štampač kako bi napravili fleksibilni list nalik tepihu koji je sposoban da se talasa. Zavojna struktura na donjoj strani lista rotira se poput vadičepa da izazove talasanje tepiha i stvori putujući talas na vodi.
Analiza kretanja tečnosti bila je ključna za ovo istraživanje.
„Morali smo da razumemo protok tečnosti da bismo okarakterisali ponašanje pumpanja“, rekao je Jung. Sistem za pumpanje tečnosti zasnovan na puževoj tehnici je otvoren za vazduh. Istraživači su izračunali da bi sličan zatvoreni sistem, gde je pumpa zatvorena i koristi cev za usisavanje vode i čestica, zahtevao visoke energetske unose za rad. S druge strane, otvoreni sistem nalik pužu je daleko efikasniji. Na primer, prototip, iako mali, radi na samo 5 volti električne energije dok i dalje efikasno usisava vodu, rekao je Jung.
Zbog težine baterije i motora, istraživači će možda morati da pričvrste uređaj za plutanje na robota da ne bi potonuo, rekao je Jung.