Tokom proteklih nekoliko decenija, robotičari su razvili robote inspirisane širokim spektrom životinja, uključujući pse, zmije, ptice, pauke, slepe miševe, hobotnice i različite vrste insekata. Ovi roboti su prvenstveno dizajnirani za rešavanje praktičnih problema iz stvarnog sveta, na primer, ulazak u uske prostore, kretanje po neravnim terenima ili pouzdano letenje na velikim udaljenostima.
Tim istraživača na Univerzitetu Stanford nedavno je razvio malog robota koji izgleda kao punoglavac, a zatim ga koristio za proučavanje roditeljskog ponašanja otrovnih žaba (R. imitator), vrste otrovne i jarke boje žabe porijeklom iz Centralne i Južne Amerike. Njihov rad, objavljen na arKsiv serveru za pre-štampanje, predstavio je neka veoma zanimljiva zapažanja, kako u pogledu toga kako su žabe reagovale na robota, tako i u pogledu njihovog ponašanja sa svojim potomcima.
„Životinjski modeli nude riznicu načina na koji organizmi reaguju i prilagođavaju se ekološkim pritiscima“, rekla je Bili K. Gulsbi, jedan od istraživača koji su sproveli studiju, za Phis.org. „Zainteresovani smo za otrovne žabe zato što pokazuju ogromnu raznolikost ponašanja, posebno u pogledu roditeljske brige. Pošto mnoge žabe prepoznaju prostor, a ne srodstvo direktno (tj. iako prepoznavanje lica), mi možemo oportunistički manipulisati bazenima punoglavaca ili rasadnicima, pomoću robota punoglavci da vide kako roditelji reaguju na promene signala potomaka. Za mnoge druge vrste to nije moguće, jer roditelji direktno prepoznaju srodstvo ili postoje drugi signali koje moramo da uzmemo u obzir, kao što je takmičenje braće i sestara.“
Neka prethodna istraživanja su takođe pokušala da uvedu robotske žabe u isto okruženje kao i prave žabe, generalno da posmatraju njihovo društveno ponašanje i donošenje odluka. Gulsbi i njegove kolege su, s druge strane, posebno želeli da istraže da li bi robot sličan punoglavcu na neki način uticao na roditeljsko ponašanje otrovnih žaba.
Jedno ponašanje koje ih je posebno zanimalo je uobičajena sklonost majki otrovnih žaba da ispuštaju neoplođena jajašca i daju njima svoje potomstvo, nakon što ovi pokažu „prosjačko“ ponašanje (tj. približavanje stražnjici žabe dok snažno mrdaju svojim potomcima). Rep). Takođe su želeli da prouče ponašanje žaba očeva, koje generalno pregledaju rasadnike i procenjuju potomstvo, kako bi utvrdili kojima je potrebno hranjenje.
„Specifične vrste koje proučavamo razvile su snabdevanje majki, gde majke puštaju obroke od neoplođenih jaja prosjačenim potomcima“, objasnio je Gulsbi. „Obezbeđivanje majki je koordinisano očevim pozivom, gde očevi takođe nadgledaju rasadnike kako bi procenili potomstvo. Proučavamo posete roditelja, očevo pozivanje i obezbeđivanje majke kao aspekte roditeljskog truda kod ove vrste.“
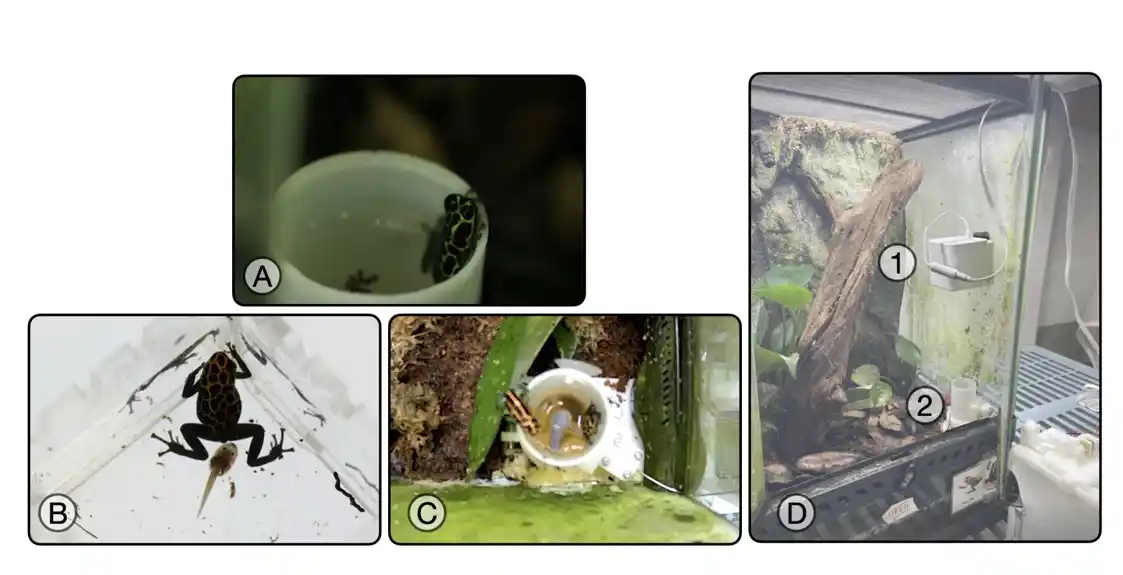
Da bi sproveli svoje eksperimente, istraživači su prvo napravili malog robota koji može da oponaša pokrete tela punoglavaca. Zatim su uveli ovog robota u veliki akvarijumski rezervoar sa otrovnim žabama, daljinski kontrolišući njihove pokrete tako da su ponovili prosjačko ponašanje punoglavaca.
„Motor izvan našeg robota rotira polugu, koja vuče konopac koji je pričvršćen za unutrašnjost robota“, rekao je Toni G. Chen, drugi istraživač uključen u studiju. „Dakle, ovo zajedno sa opružnim elementom koji se nalazi unutar robota, vuče i gura rep TadBot-a, proizvodeći pomeranje. Glavna prednost ovog podešavanja je što omogućava da TadBot bude zaista mali, blizu veličine pravog punoglavca“.
Robot koji su kreirali Gulsbi, Čen i njihove kolege veoma podseća na punoglavce po veličini, izgledu i pokretima. Posebno, njegov motor se može montirati izvan akvarijumskog rezervoara, kako bi se sprečilo da buka koju proizvodi alarmira žabe ili ometa njihove normalne aktivnosti.
Istraživači su otkrili da je robot „prošao test“ i prevario roditeljske žabe, posebno očeve žabe, koje su se prema njemu ponašale kao da je jedan od njihovih potomaka. U mnogim slučajevima, kada su roboti nalik punoglavcima počeli da „mole“ i energično vijugaju repom, očevi su pokušavali da koordiniraju brigu, pozivajući majke u rasadnike kako bi one mogle hraniti robote neoplođenim jajima.
Zanimljivo, dok su majke odgovorile na poziv i posetile rasadnik punoglavaca, nisu puštale neoplođena jaja, što sugeriše da su nekako shvatile da roboti nisu potomci. U svom radu, istraživači sugerišu da se majke mogu osloniti na dodatne signale kada pokušavaju da odluče da li će odložiti jaje ili ne, kao što su vibracije ili drugi suptilni pokreti.
„Nadamo se da naš rad može da obezbedi alat koji se može lako koristiti za manipulaciju signalima potomaka, informišući nas o tome kako vibracioni signali mogu biti predstavljeni kod vodozemaca i gde se roditeljsko odlučivanje dešava u mozgu“, rekao je Gulsbi. „Kombinujući ove nalaze, možemo početi da bolje razumemo poreklo i evoluciju neuronskih kola uključenih u roditeljstvo.“
Nedavna studija Goolsbija, Čena i njihovih kolega naglašava ogroman potencijal robota za bezbedno proučavanje društvenog ponašanja životinja. U budućnosti bi to moglo da inspiriše nove radove koji imaju za cilj razvoj bio-mimetičkih robota, koristeći ih za interakciju sa različitim životinjskim vrstama i posmatranje ponašanja koje rezultira.
„Sada planiramo da mehanički poboljšamo TadBot-a da bude više kao pravi punoglavac na osnovu podataka koje smo prikupili, dok takođe sprovodimo dalje studije ponašanja“, dodao je Čen.


