Rak je poznat po visokoj stopi smrtnosti i sve većoj incidenci širom sveta. Među njima, rak pluća je verovatno jedan od najrazornijih. Prema Međunarodnom fondu za istraživanje raka, rak pluća je bio drugi najčešći rak širom sveta u 2020. godini, sa više od 2,2 miliona novih slučajeva i 1,8 miliona smrtnih slučajeva.
Međutim, rak pluća, kao i drugi karcinomi, lakše se leči ako se ranije uhvati. „Prijavljena stopa preživljavanja od jedne godine za stadijum V je samo 15% do 19% u poređenju sa 81% do 85% za stadijum I, što znači da rana diferencijacija benignih i malignih plućnih čvorova može efikasno smanjiti smrtnost“, rekao je Ksingguang. Duan, naučnik sa Fakulteta medicinske tehnologije, Pekinškog tehnološkog instituta.
Duan i njegove kolege veruju da je rana dijagnoza raka pluća neophodna za blagovremeno lečenje i bolje prognoze. U tu svrhu, osmislili su novi robotski sistem bronhoskopa koji može nenametljivo pristupiti oblasti od interesa u plućima za minimalno invazivno uzorkovanje plućnih lezija, zlatni standard dijagnoze raka pluća. Ovo istraživanje objavljeno je u časopisu Ciborg and Bionic Sistems.
„Zamislite da ubacite dugačku tanku liniju u usta, kroz disajne puteve da biste isekli mali deo lezije koja vas zanima u plućima. Nakon toga, ova tanka linija vraća uzorak na dalje ispitivanje kako bi se utvrdilo da li je benigna ili maligna, “, rekli su autori studije. „Za ovo je dizajniran sistem bronhoskopa. Naš krajnji efektor je baš kao tanka linija. Da bi to uradili, ova linija prvo mora biti dovoljno tanka da pređe dušnik i bronh.“
„Štaviše, mora biti u stanju da se savija, rotira i prevodi kako bi se fleksibilno kretao kroz složenu mrežu disajnih puteva“, objasnio je Čangšeng Li, odgovarajući autor ovog istraživanja, sa Škole za mehatroničko inženjerstvo, Pekinškog tehnološkog instituta.
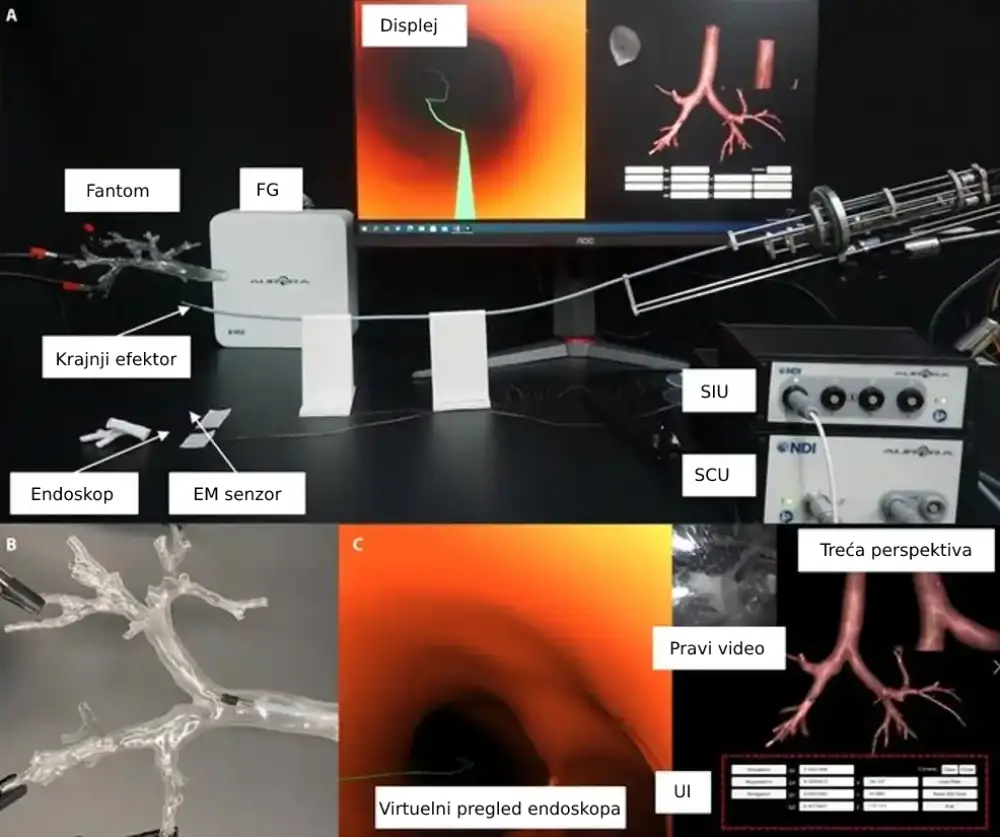
„Još jedan problem je što ne možete da vidite krajnji efektor ove linije kroz pacijentova grudi. Međutim, da biste precizno pristupili leziji od interesa, pozicija i poza krajnjeg efektora moraju da se odrede u realnom vremenu“, rekao je autori. Oni su rešili ovaj problem tako što su razvili navigacioni sistem, koji pričvršćuje endoskop i dva elektromagnetna senzora na krajnji efektor, što omogućava onlajn pozicioniranje za navigaciju i pruža vizuelne informacije lekarima za dijagnozu i uzorkovanje.
Navigacioni sistem takođe rekonstruiše trodimenzionalni virtuelni model zasnovan na kompjuterskoj tomografiji za robotsko planiranje putanje, uz izbor ciljne oblasti. Kombinujući fleksibilni krajnji efektor i sistem za navigaciju, robotski sistem bronhoskopa može automatski doći do ciljane lezije i obezbediti intraoperativno vizuelno vođenje za uzorkovanje biopsije.
Oni su potvrdili izvodljivost ovog robotskog sistema bronhoskopa putem eks vivo eksperimenta intervencije uz pomoć navigacije. „Tokom eksperimenta, pozicija prikazana u trećoj perspektivi virtuelnog endoskopa je u skladu sa položajem vrha krajnjeg efektora u odnosu na fantom disajnih puteva iz vizuelnog posmatranja. Virtuelni prikaz endoskopa se takođe poklapa sa stvarnim video snimkom koji je video modul endoskopa kao što se očekivalo“, rekao je Li.
„Iako je sistem postigao obećavajuće performanse bronhoskopije, kao medicinski uređaj, i dalje postoje neki problemi koji ograničavaju kliničku primenu i promociju“, objasnili su autori. „Pre svega, potreban je praktičniji manevar da bi hirurzi lako naučili i koristili; Drugo, potreban je endoskopski pregled visoke rezolucije; Konačno, kalibracija između virtuelnog i stvarnog okruženja i dalje oduzima mnogo vremena i nije prijateljska za početnike.
U budućnosti će se fokusirati na minimiziranje prečnika krajnjeg effktora i usvajanje zamenljivih modula za različite hirurške zahteve, istraživanje kontrole zglobova kako bi se robotu omogućilo fleksibilnije kretanje u disajnim putevima i usvajanje algoritama kompjuterskog vida za realizaciju automatske i inteligentne kalibracije.