Poslednjih godina, robotičari i kompjuterski naučnici su uveli različite nove računarske alate koji bi mogli da poboljšaju interakciju između robota i ljudi u realnim okruženjima. Sveobuhvatni cilj ovih alata je da robote učine odgovornijim i prilagođenijim korisnicima kojima pomažu, što bi zauzvrat moglo olakšati njihovo široko usvajanje.
Istraživači iz Leonardo Labs i Italijanskog instituta za tehnologiju (IIT) u Italiji nedavno su predstavili novi računarski okvir koji omogućava robotima da prepoznaju određene korisnike i prate ih u datom okruženju. Ovaj okvir, uveden u dokumentu objavljenom kao deo Međunarodne konferencije IEEE o naprednoj robotici i njenim društvenim uticajima (ARSO) 2023., omogućava robotima da ponovo identifikuju korisnike u svom okruženju, dok takođe izvode specifične radnje kao odgovor na pokrete ruku koje izvode korisnika.
„Imali smo za cilj da napravimo revolucionarnu demonstraciju kako bismo privukli zainteresovane strane u naše laboratorije“, rekao je za Tech Ksplore Federico Rollo, jedan od istraživača koji su sproveli studiju. „Robot za praćenje osoba je preovlađujuća aplikacija koja se nalazi u mnogim komercijalnim mobilnim robotima, posebno u industrijskim okruženjima ili za pomoć pojedincima. Obično takvi algoritmi koriste eksterne Bluetooth ili Vi-Fi emitere, koji mogu ometati druge senzore i korisnik je potreban da nose.“
Ključni cilj nedavnog rada Rolla i njegovih kolega bio je stvaranje modela ponovne identifikacije koji može prepoznati specifične mete na slikama snimljenim RGB kamerom. RGB kamere su među najčešće korišćenim senzorima u oblasti robotike, pa ih je veoma lako nabaviti i integrisati sa postojećim robotskim sistemima.
„Modul ponovne identifikacije koji smo razvili sastoji se od dva uzastopna koraka: korak kalibracije i korak ponovne identifikacije“, objasnio je Rolo.
„Tokom koraka kalibracije, od ciljne osobe se traži da se nasumično kreće ispred robota. U ovoj fazi, robot koristi neuronsku mrežu da otkrije osobu i nauči njen izgled u obliku mrežnih ugradnji (zamislite apstraktni vektor koji predstavljaju osobine osobe). Ove ugradnje se zatim koriste za kreiranje statističkog modela koji predstavlja cilj.“
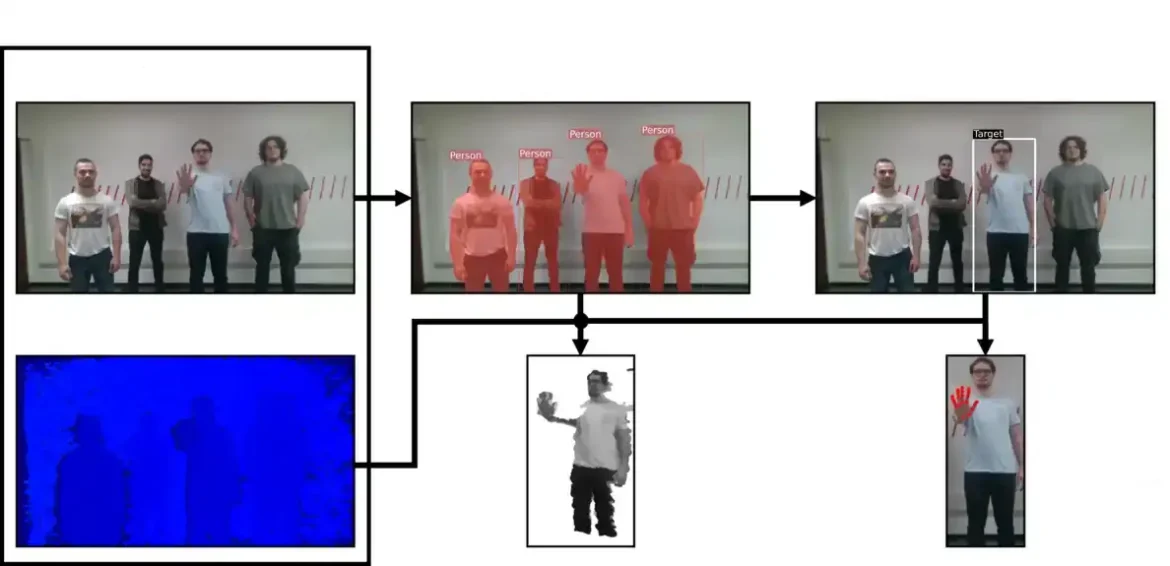
U drugoj fazi svoje obrade, modul koji su kreirali istraživači ponovo identifikuje mete dok se prirodno kreću u svom okruženju. Okvir to postiže analizom slika dobijenih jednom ili više RGB kamera, otkrivanjem ljudi na ovim slikama, izračunavanjem njihovih karakteristika i upoređivanjem ovih karakteristika sa onima navedenim u modelu ciljnog korisnika kreiranom tokom faze kalibracije.
„Ako se određene karakteristike statistički poklapaju sa modelom, osoba sa tim karakteristikama se bira kao meta“, rekao je Rolo. „Ove informacije se zatim šalju modulu za lokalizaciju, koji izračunava 3D poziciju ciljanog korisnika i šalje komande brzine robotu da se kreće prema njemu/njoj. Dodatno, aplikacija uključuje modul za detekciju pokreta.“
Model detekcije pokreta koji su kreirali Rollo i njegove kolege detektuje specifične pokrete ruku ciljnog korisnika i šalje komande robotu usklađene sa ovim gestovima. Na primer, ako korisnik stavi otvorenu ruku ispred vidnog polja robota, to pokreće komandu za zaustavljanje, navodeći robota da se zaustavi. Nasuprot tome, ako korisnik pokaže zatvorenu ruku, robot će ponovo početi da radi.
Do sada su istraživači testirali svoj okvir u nizu eksperimenata koristeći robot Robotnik RB-Kairos+. Ovo je mobilni robotski manipulator dizajniran da se prvenstveno uvede u industrijska okruženja, kao što su skladišta i proizvodne lokacije.
„Modul ponovne identifikacije pokazao je izuzetnu robusnost tokom testiranja, čak iu prepunim mestima“, rekao je Rolo. „Ovo robusno ponašanje otvara različite praktične primene. Na primer, moglo bi da se koristi za pomeranje objekata sa velikim opterećenjem u industrijskim okruženjima, vođenje robota do različitih stanica u kolaborativnom ili industrijskom okruženju ili pomoć starijim osobama u premeštanju svojih stvari unutar kuća.“
Novi okvir za ponovnu identifikaciju i detekciju pokreta koji je razvio ovaj tim istraživača uskoro bi mogao da se primeni i dalje testira u različitim scenarijima iz stvarnog sveta koji zahtevaju da mobilni roboti prate ljude i autonomno transportuju predmete. Međutim, pre nego što se može primeniti u velikim razmerama, Rollo i njegove kolege planiraju da prevaziđu neka ograničenja modela identifikovana tokom njihovih početnih eksperimenata.
„Jedno značajno ograničenje je to što statistički model dobijen tokom faze kalibracije ostaje konstantan tokom ponovne identifikacije“, dodao je Rollo.
„To znači da ako meta promeni svoj izgled, na primer, noseći drugu odeću, algoritam nije u stanju da se prilagodi i zahteva rekalibraciju. Pored toga, postoji izražen interes za istraživanje novih pristupa prilagođavanju same neuronske mreže da prepozna metu , potencijalno koristeći metode kontinuiranog učenja. Ovo bi moglo poboljšati statističku podudarnost između ciljnog modela i karakteristika ekstrahovanih iz RGB slika, pružajući prilagodljiviji i fleksibilniji sistem.“