Već decenijama robotisti pokušavaju da razviju robote koji su veoma slični ljudima, kako po izgledu tako i po sposobnostima. Nedavni tehnološki napredak otvorio je uzbudljive nove mogućnosti za stvaranje robotskih sistema sličnih čoveku, na primer uvođenjem naprednijih senzora i mekane veštačke kože.
Istraživači sa Bio-inspirisane robotske laboratorije Univerziteta u Kembridžu nedavno su kreirali novu kožu zasnovanu na hidrogelu koja bi mogla da omogući robotima da otkriju taktilne osobine objekata, veštački reprodukujući ljudsko čulo dodira. Ova veoma rastezljiva koža, predstavljena u radu objavljenom u Materials Todai Electronics, rekonstruiše taktilne stimuluse koristeći seriju elektroda i računarski pristup bez modela.
„Nedavno su istraživači širom sveta bili zainteresovani za to kako se roboti mogu proizvesti od fleksibilnih i rastegljivih materijala“, rekao je za TechXplore David Hardman, jedan od istraživača koji su sproveli studiju. „Ovi ‘meki’ roboti su bezbedniji za rad, ne oštećuju predmete sa kojima komuniciraju i mogu da obavljaju zadatke koji su veoma teški za tradicionalne ‘rigidne’ robote. Međutim, za punu korist, sve od robota komponente moraju biti meke, uključujući sve senzore.“
Crpeći inspiraciju iz ljudske kože, Hardman i njegove kolege su krenuli da kreiraju rastezljiv senzorni materijal koji bi mogao da otkrije bilo kakvo oštećenje, oseti objekte ili ljudski dodir i nadgleda okolinu. Veštačka koža koju su napravili zasnovana je na hidrogelu (tj. gelu nerastvorljivom u vodi koji takođe sadrži vodu u sebi) u kombinaciji sa hardverskim sistemom zasnovanim na elektrodama.
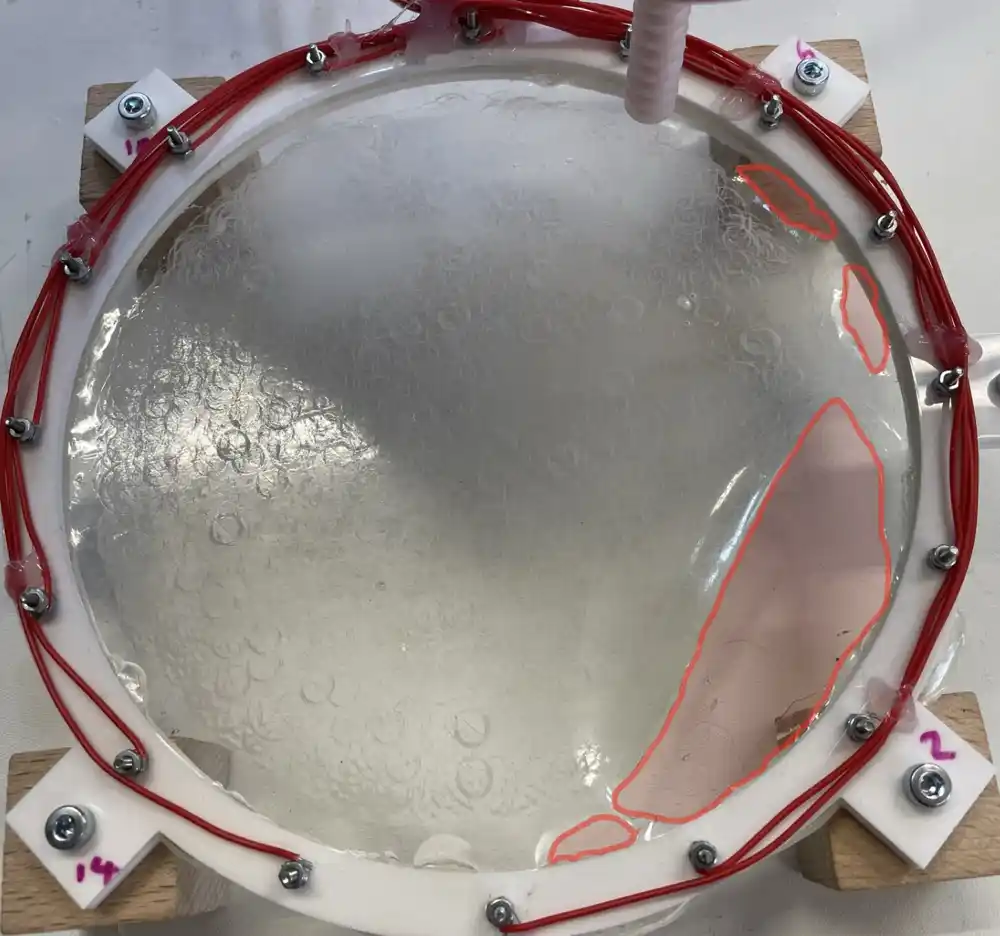
„Koristimo specijalno razvijen senzorizovani hidrogel kao osnovu naše kože, jer je biorazgradiv, prilagodljiv i veoma rastegljiv“, objasnio je Hardman. „Uparili smo ovo sa hardverom električne impedansne tomografije (EIT), koji koristi elektrode na ivici kože da primeni struje i meri napone koji nam daju informacije o stanju kože. Koristeći ove napone, pokušavamo da zaključimo gde je koža je dodirnuto ili je oštećeno.“
Umesto da analiziraju podatke prikupljene elektrodama koristeći konvencionalnu arhitekturu zasnovanu na neuronskim mrežama, kao što to čini većina postojećih veštačkih koža, Hardman i njegove kolege su kreirali mape deformacije za svoj sistem zasnovan na hidrogelu koristeći malu količinu podataka iz stvarnog sveta. U početnim procenama, otkrili su da je njihov sistem značajno nadmašio sistem veštačke kože zasnovan na konvencionalnim neuronskim mrežama, postigavši prosečnu rezoluciju od 12,1 mm preko kružne kože od 170 mm.
„Kombinovanje tehnologija električne impedansne tomografije sa funkcionalnim senzorizovanim skinovima rezultira nizom problema koje je veoma teško rešiti korišćenjem čisto matematičkih pristupa“, rekao je Hardman. „Predstavili smo način da ovo uveliko pojednostavimo uključivanjem male količine podataka iz stvarnog sveta u naše proračune. Zbog toga možemo da počnemo da se bavimo aplikacijama koje bi bile nezamislive korišćenjem analitičkog pristupa, dodajući meke taktilne senzore preko čitavog površine naših robota.“
Do sada su Hardman i njegove kolege testirali potencijal svoje kože na bazi hidrogela za tri ključne primene u stvarnom svetu, odnosno otkrivanje ili lokalizaciju oštećenja, praćenje okoline i prepoznavanje različitih taktilnih stimulusa. Njihov sistem se dobro pokazao u sva ova tri zadatka, što sugeriše da bi se mogao koristiti za poboljšanje sposobnosti mekih robotskih sistema dizajniranih za rešavanje različitih misija.
„Trenutno radimo na poboljšanju oblika i veličine kože tako da se mogu koristiti za osećanje mnogo složenijih stimulansa“, dodao je Hardman. „Na primer, ako se koža nanese na robotsku ruku, želeli bismo da oseti ne samo lokaciju i snagu dodira kože, već i položaj svakog prsta i da li je ruka oštećena.“